3-URU((DYMO))

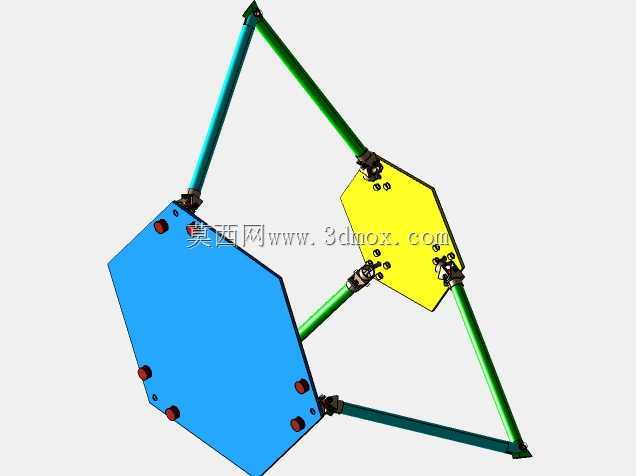
3-URU双Y多操作(DYMO)并联机构由三条腿组成,每条腿上有两个万向节和一个转动关节。该操纵器的行为非常吸引人,允许不同配置的平台运动系统产生不同的操作模式。总共有5种不同的操作模式,这些模式通过约束奇点分开。该项目是我的一个朋友的论文,他在施工阶段,成功地控制了其末端?-我祝愿易卜拉希米先生在人生的各个阶段都取得成功
标签:


- 模型大小 :1.4 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA,Rendering