笛卡尔机器人(3轴)



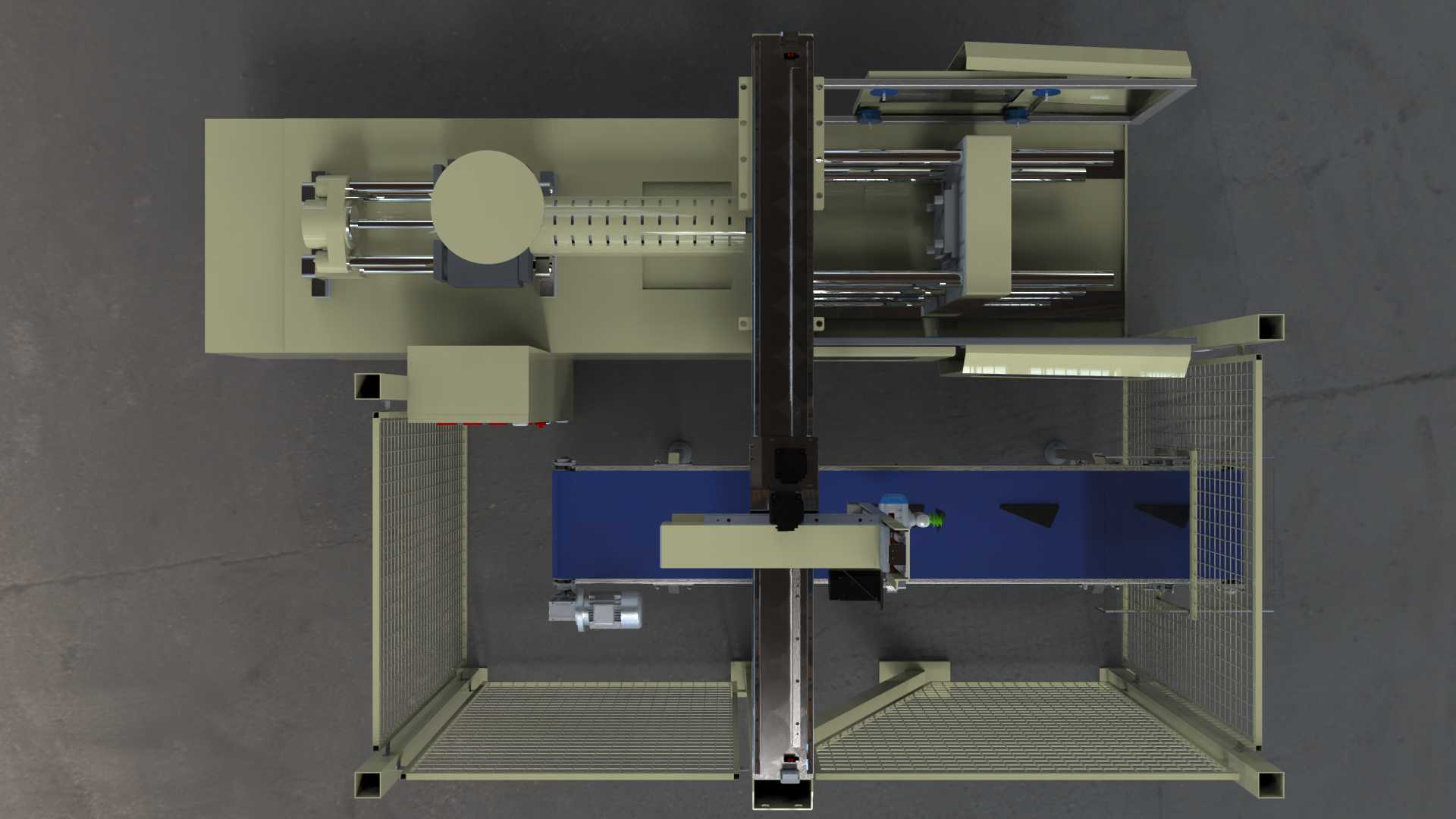
这项工作的目标是设计和生产一个具有3个轴的笛卡尔机器人,该机器人能够在考虑到多个强制约束的情况下精确拾取模塑件。刚性精度工作空间有关更多详细信息,请在我的脸上与我联系bookhttps://www.facebook.com/profile.php?id=100008414521093
标签:


- 模型大小 :12.41 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Other,Other,Rendering