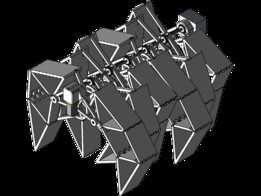
切比雪夫双足步行机器人
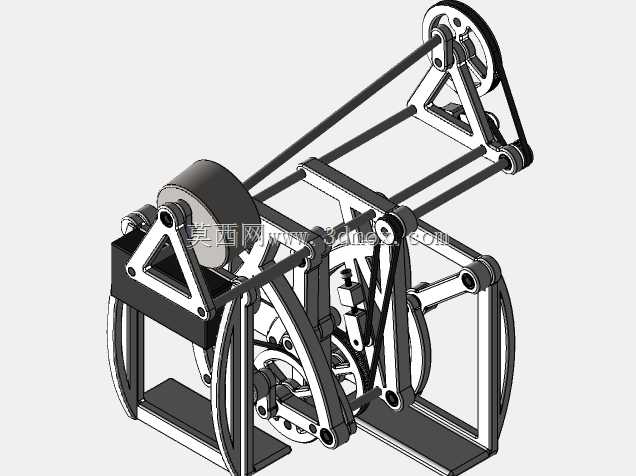
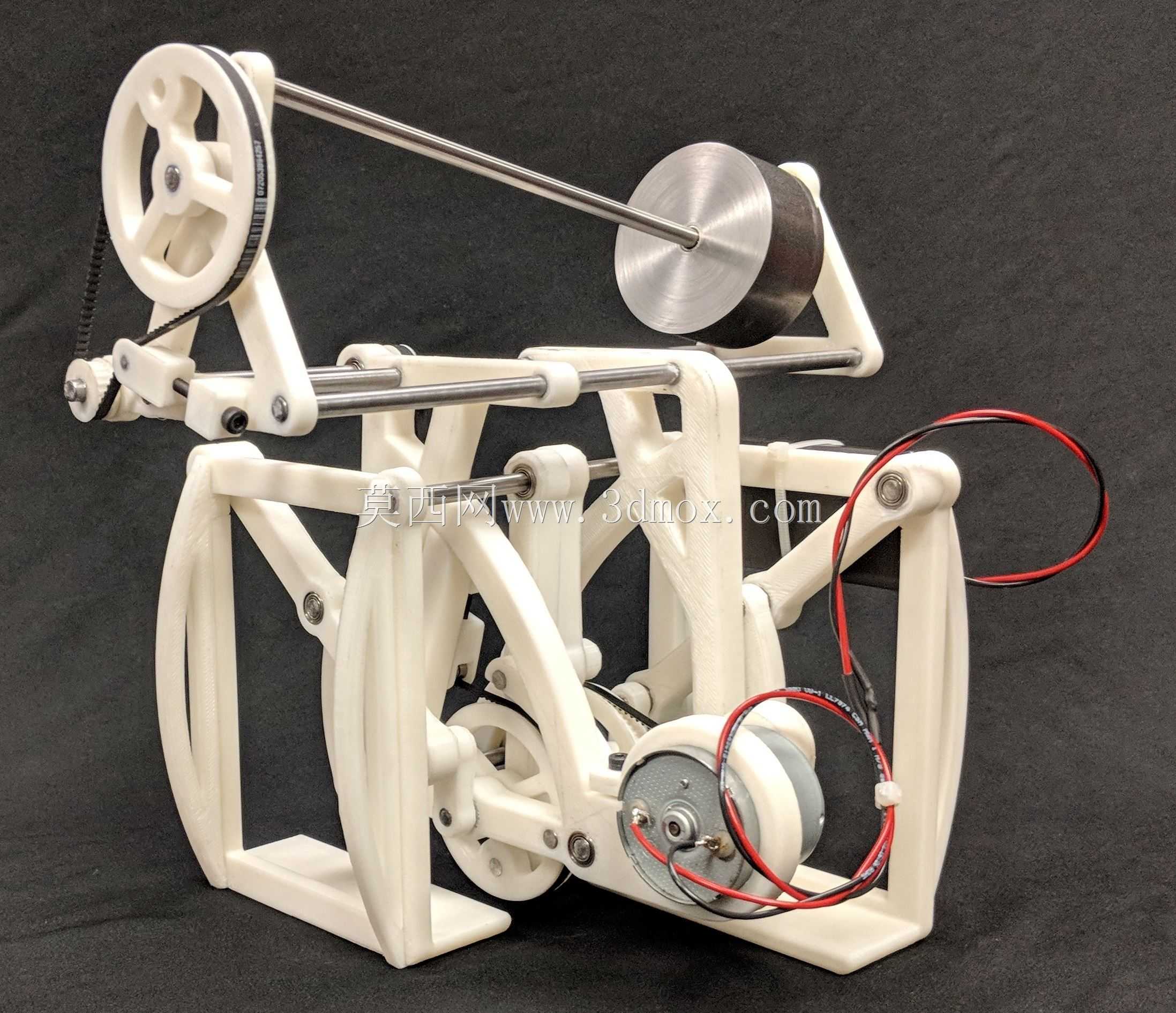
我们为一个班级设计并建造了一个静态平衡的两足步行机器人。它使用一个直流电机驱动切比雪夫-拉姆达机构,该机构移动支腿和一个保持质心高于接地支腿的配重。大多数零件都是印刷品。采购零件包括:-3mm钢轴-5mm钢轴-3mm x 6mm x 2.5mm滚珠轴承-5mm x 9mm x 3mm滚珠轴承-5mm x 7mm x 8mm滑动轴承(https://www.mcmaster.com/#6679k33)-M3 x 20mm带帽螺钉-M3 x 30mm全螺纹带帽螺钉-91MXL012 1/8英寸正时皮带-140MXL012 1/8英寸正时皮带-直流电机(https://www.pololu.com/product/1102)-AA电池组(https://www.amazon.com/dp/B017LRHRN2)-外径为2英寸的圆柱形钢料
标签:


- 模型大小 :232.05 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,STL,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLID