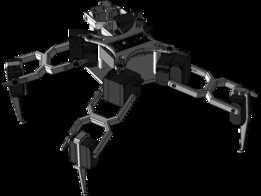
蜘蛛机器人(v1.0)STM32f103上的GS90伺服四足机器人






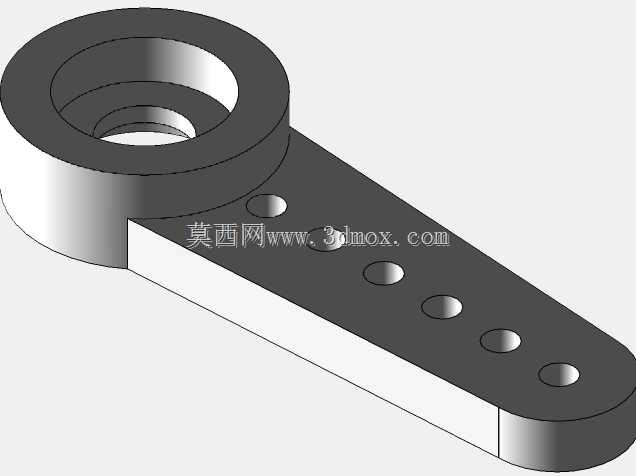
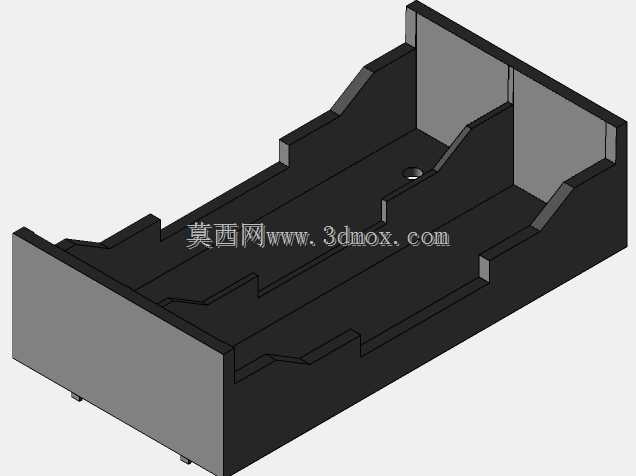

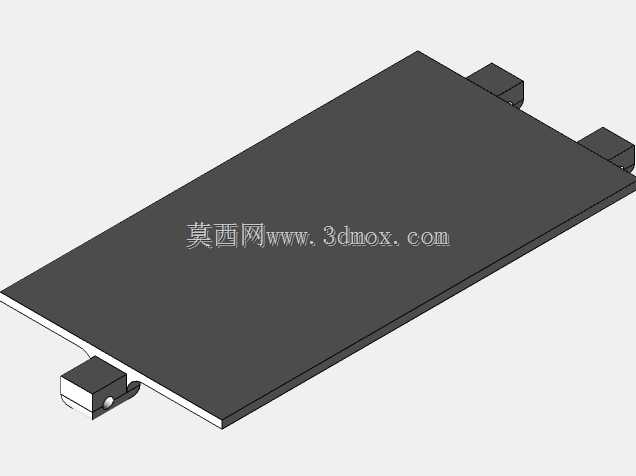

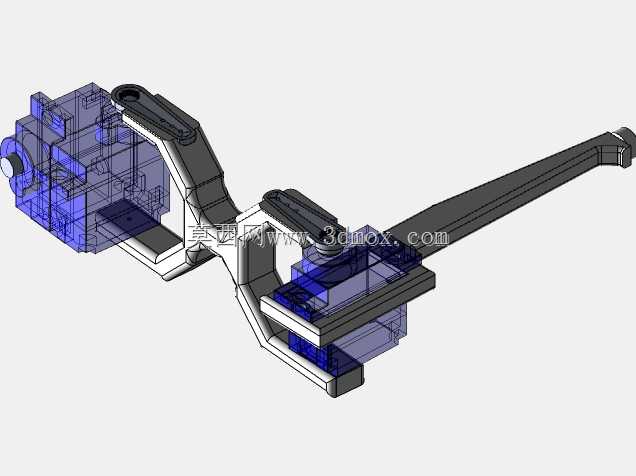









大家好。在学习各种类型机器人的主题时,我对伺服蜘蛛产生了兴趣,我发现开发人员通常更喜欢开发六足动物。当然,出路是显而易见的和可以理解的-高稳定性,渗透性和蜘蛛本身更耐用。然而,开发一种具有较小质量和微型尺寸的四足动物是令人感兴趣的。无论如何,我的发展只是一个玩具。尽管如此,她还是设法参观了展览,结果总体上非常稳定:)产品包括:1)HC-06 Bluetooth 2)x2 186503)Servo SG90 mirco(我画了我的模型,因为公共领域的模型尺寸不同)4)STM32F103该模型是用PLA塑料印刷的。您可以打印ABC,但不能打印矩形封盖。否则,在穿上时会开裂。支撑接头STL=2件错误支撑接头STL=2件中间和支撑腿空间STL=4件上基座STL=1件基座底部STL=1件盖。STL=1件支撑衬套STL=4件皮帽。STL=1件带水印的底部基座1


- 模型大小 :23.74 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,STL,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,STL,STL,STL,STL,STL,STL,STL,STL,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWO