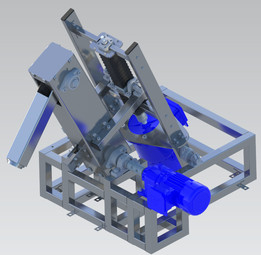
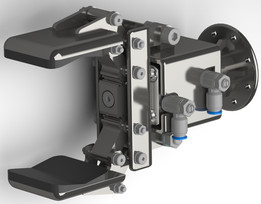
��е�۶����ɶ�
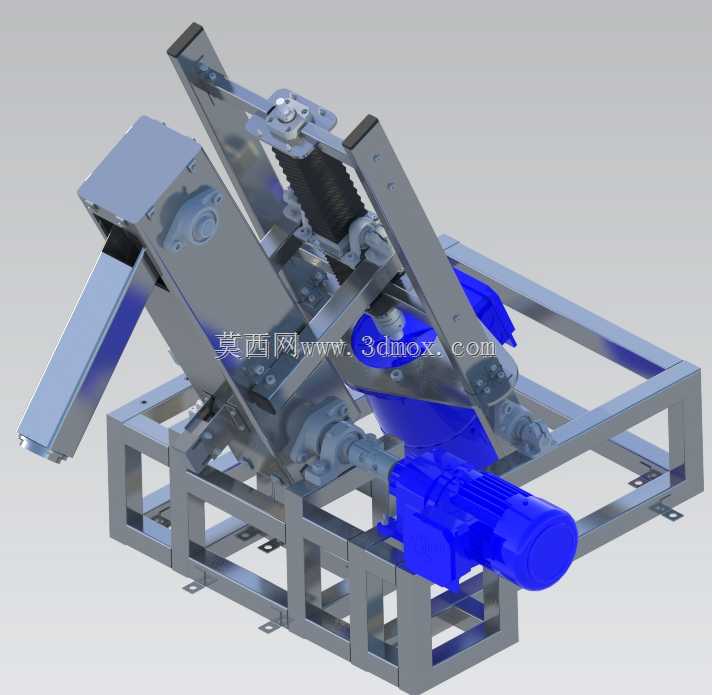
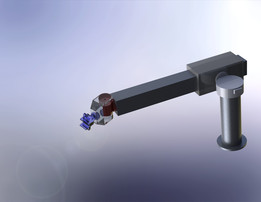
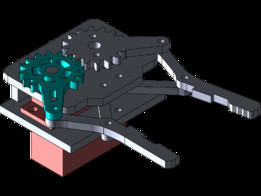
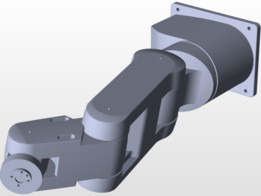
����һ��ѧ����Ŀ�����������ɶȵĻ�е�ۡ���һ���ɹ���˿�ܻ����������ڶ�����Ƥ�����������������NX����Ʋ�������STEPģ�͡�ͼֽ���ϲ���������ĿRaminia robota o 2 stopniach swobody��Pierwszy stopie��jest nap?dzany poprzez mechanizm?ruby kulowej��һ����Ϊpoprzez przek?adni?pasow?��ҩ�ꡣCz?ci zosta?y wykonane w NX'ie i wyeksportowane do pliku STEP��Rysunki Technizne wykonane s?zgodnie z polskimi normami
------�ָ���----------------------------
- ��һƪ��Scara��е��
- ��һƪ����е��9000

˵��ʲô��
- ȫ�����ۣ�0��

��û�����ۣ�������ɳ���ɣ�
- ģ�ʹ�С ��24.67 MB
- �� �� ��5Ī����
- ���ش��� ��
- �����ļ� ��STEP / IGES,Other,Other,Other,Other,Other,Other,Other,Other,Other,Other,Rendering