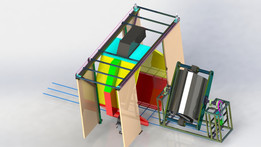
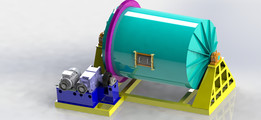
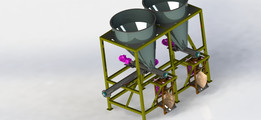
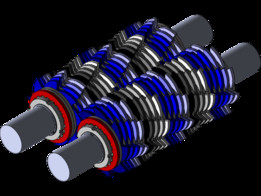
美国宇航局月球取样系统设计
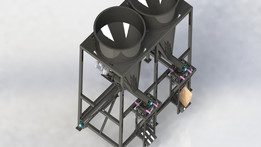
它将由一个简单的电机运动给出。并连接到机器人手臂。选择简单的伺服电机或气缸,手臂轴左右旋转。或提供机器人手臂的返回。最经济和简单的设计
标签:


- 模型大小 :26.56 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,SOLIDWORKS,Other

它将由一个简单的电机运动给出。并连接到机器人手臂。选择简单的伺服电机或气缸,手臂轴左右旋转。或提供机器人手臂的返回。最经济和简单的设计