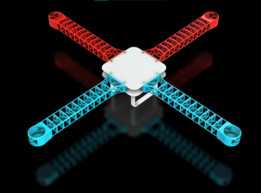
正构四旋翼机机架
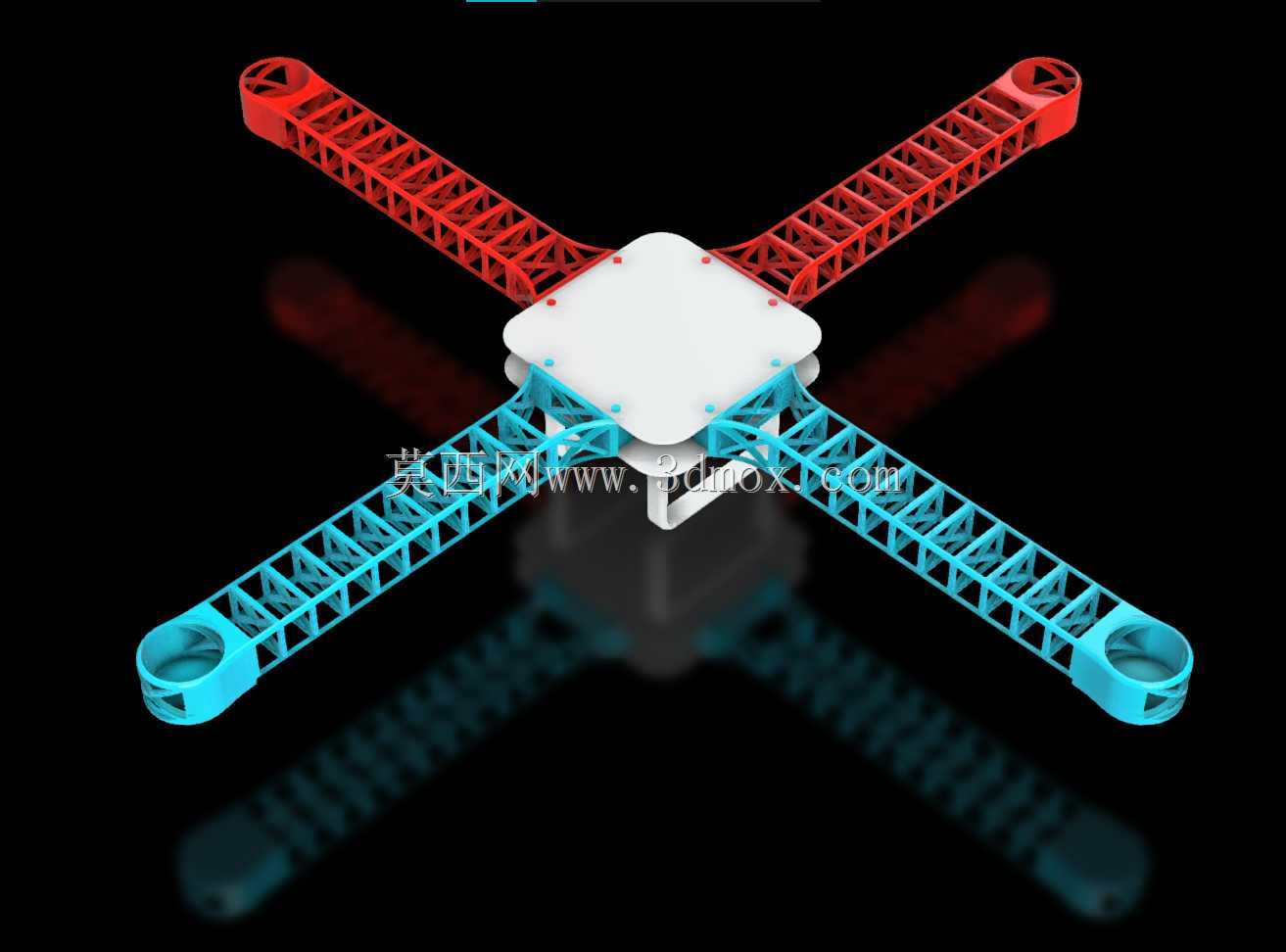

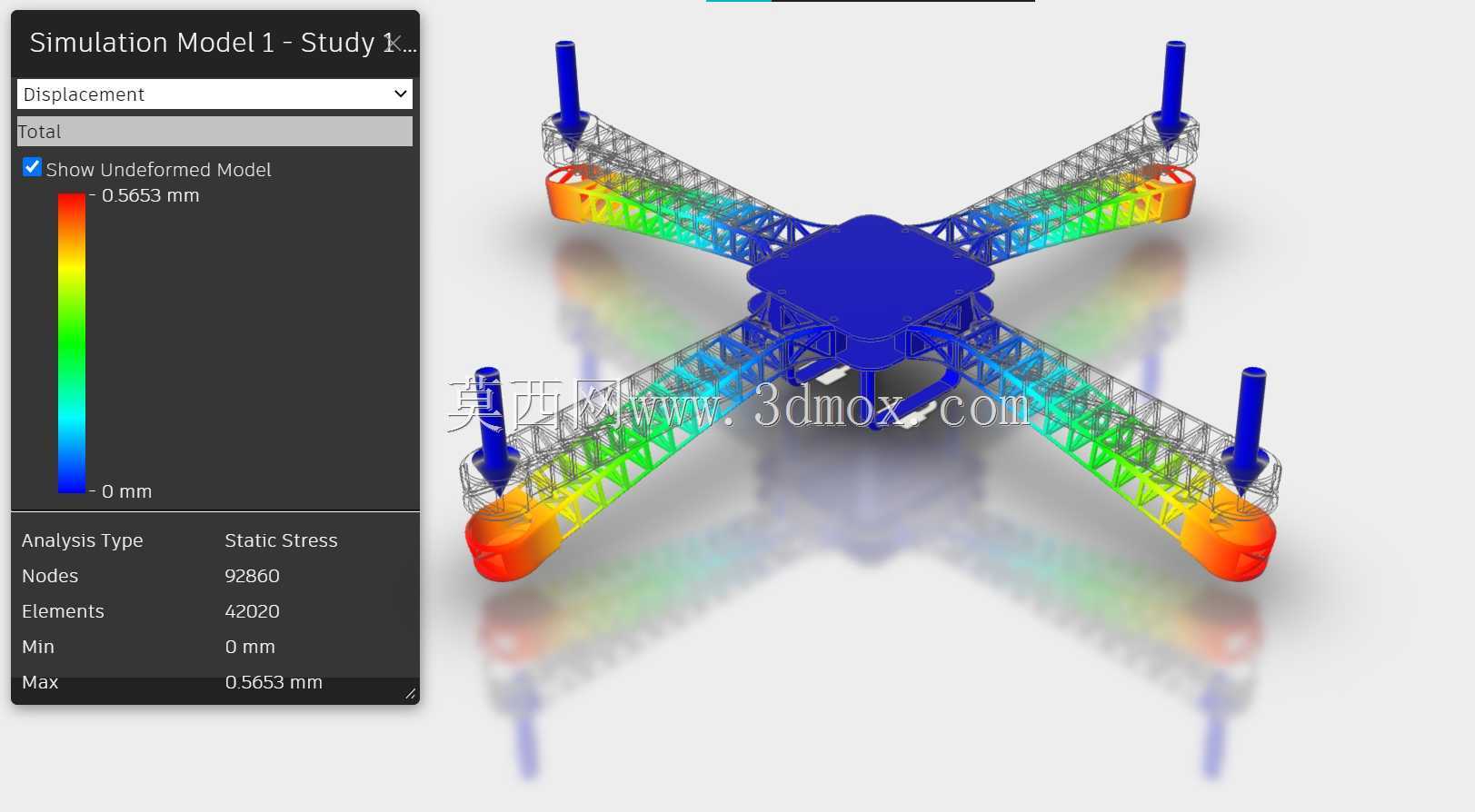
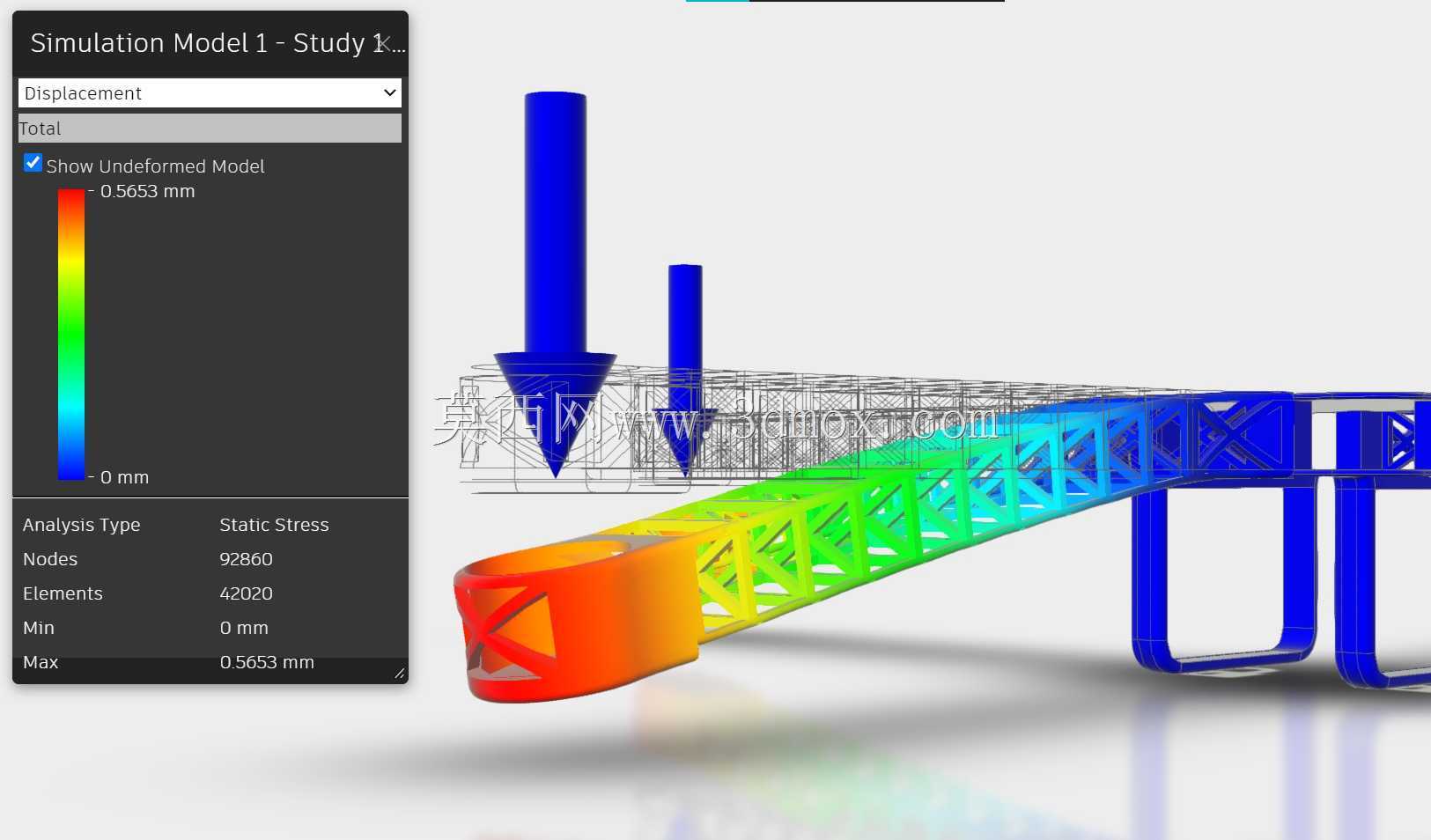
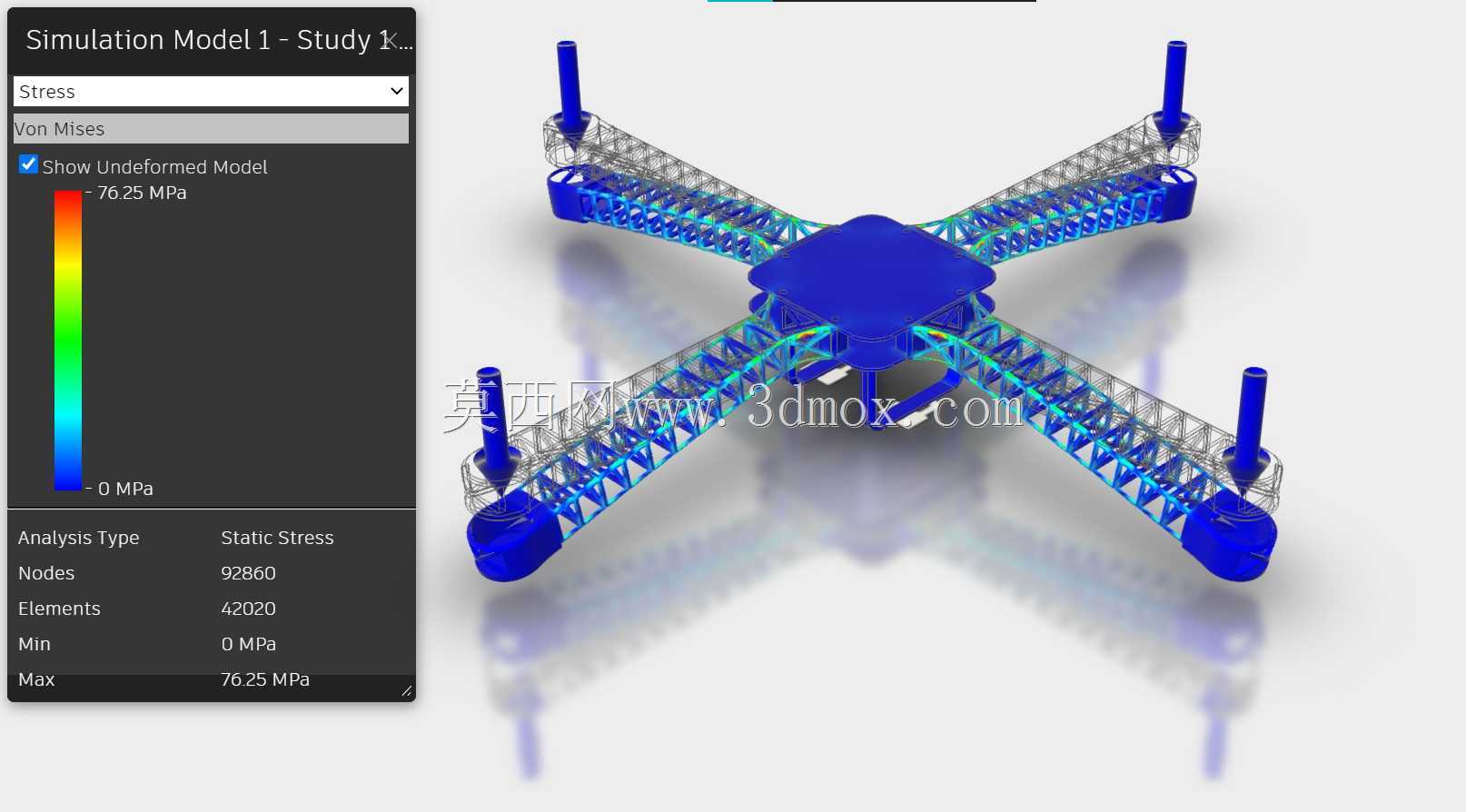
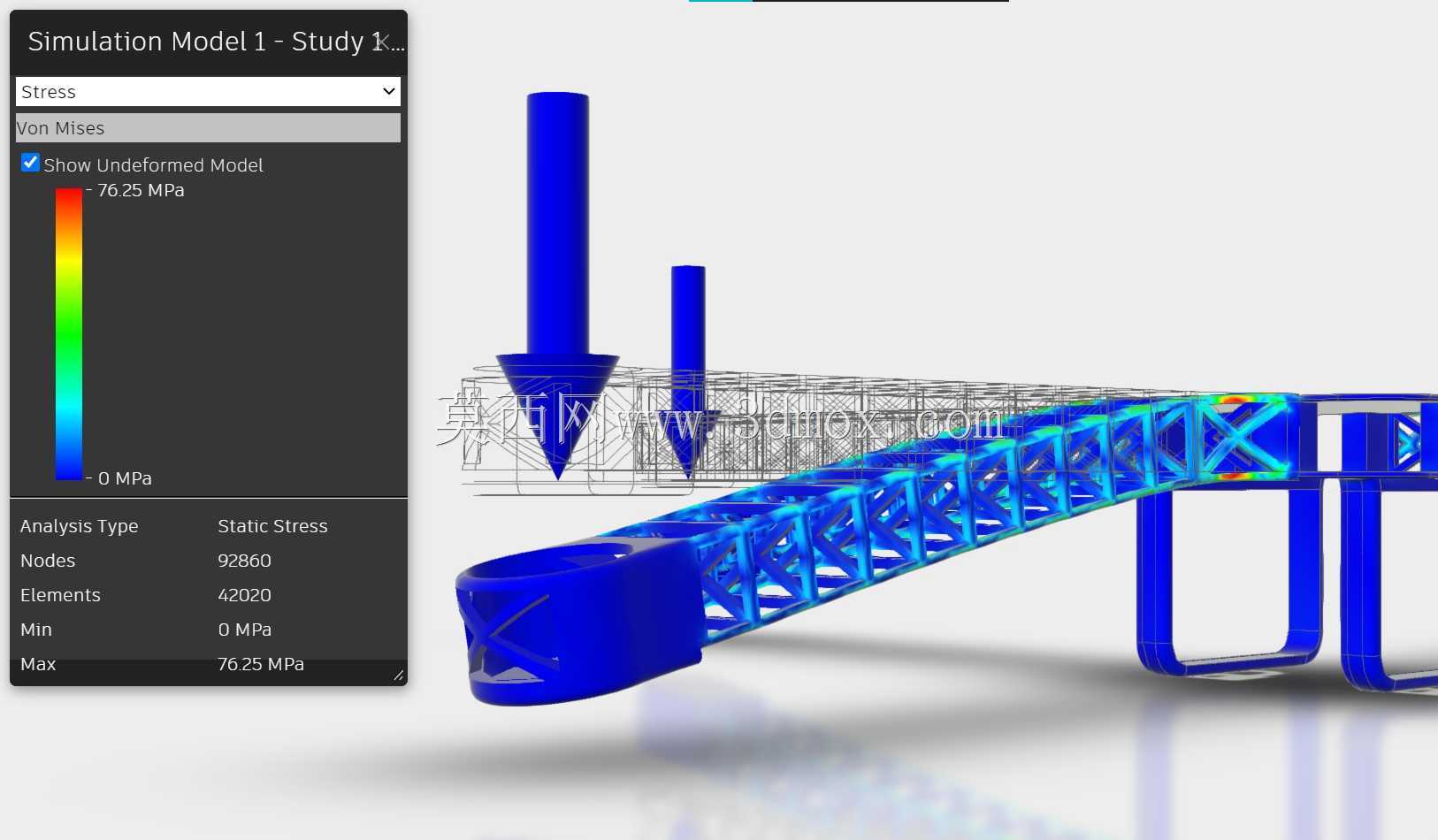
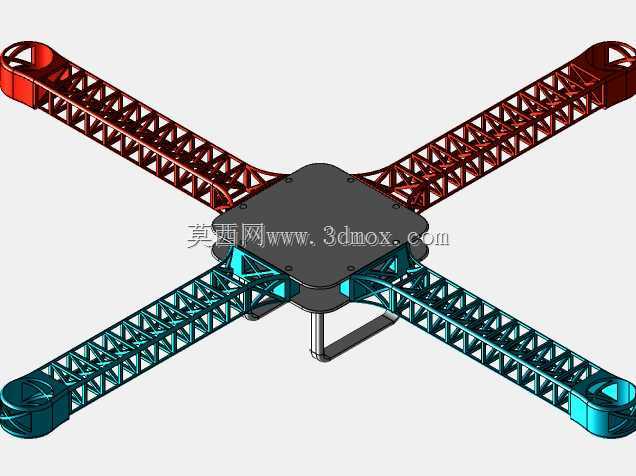
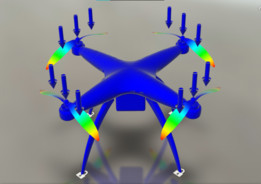
在plus配置的四旋翼直升机中,俯仰控制模式加速单个前旋翼,减慢单个后旋翼,以产生机头向上俯仰力矩。由于扭矩不随转速线性变化(变化名义上是二次的),CCW旋转的前旋翼扭矩的增加不会与CCW旋转的后旋翼扭矩的减少相同地抵消,从而在正配置四旋翼机上产生净偏航力矩,需要使用偏航控制输入进行补偿。类似地,滚转控制模式加速单个左旋翼,减慢单个右旋翼,从而在plus配置四旋翼机上产生滚转力矩。顺时针旋转右旋翼的扭矩增加不会与顺时针旋转右旋翼的扭矩减少完全抵消,因此在俯仰控制模式下,横滚控制模式会在正配置四旋翼机上产生净偏航力矩,需要通过偏航控制输入进行补偿。规格:长度:52cm高度:7cm重量:121克材料:理想状态下的碳纤维增强聚合物(CFRP),向四架直升机的臂部施加76.25 MPa的力,使其从平均位置位移5.653 cm。应力和位移的模拟结果附在文件中
标签:


- 模型大小 :7.71 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,Rendering