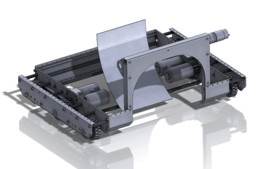
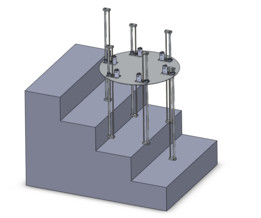
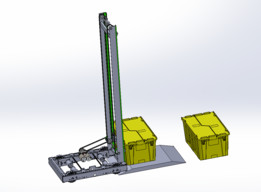
爬楼梯机器人-工作进行中
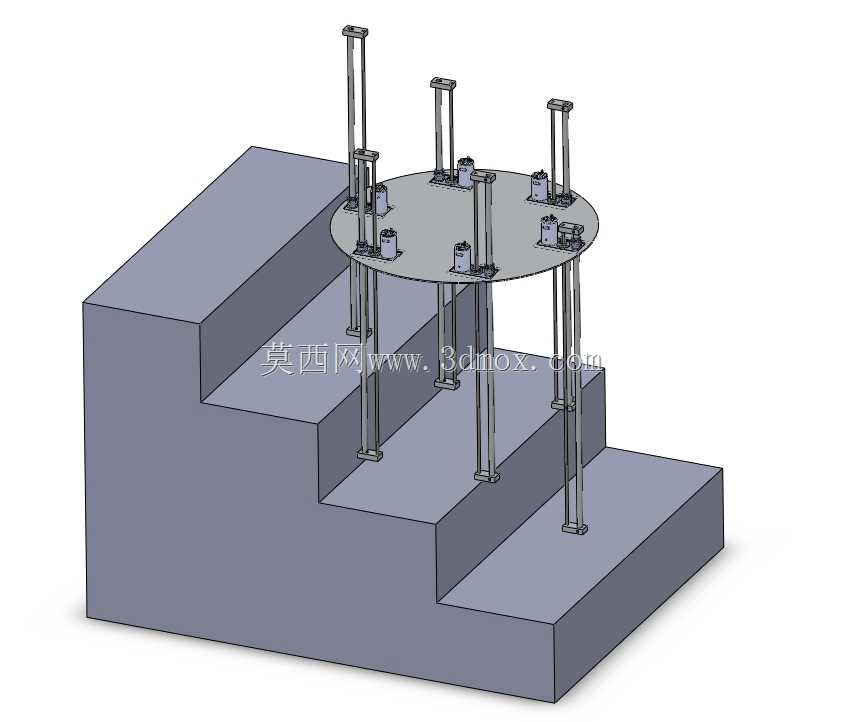
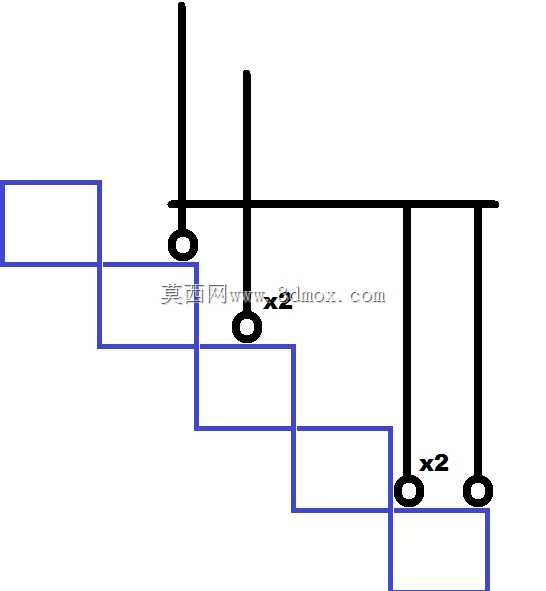
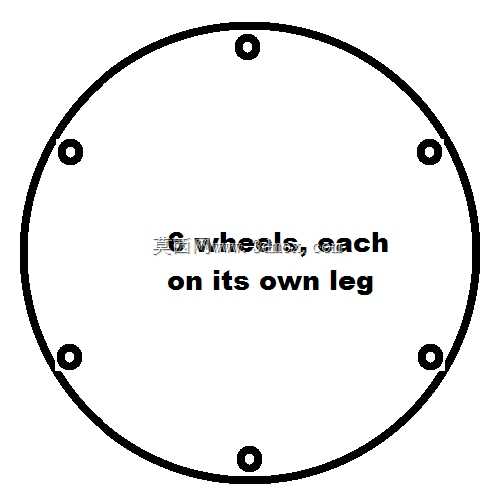


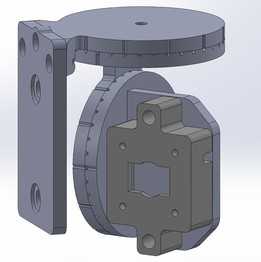
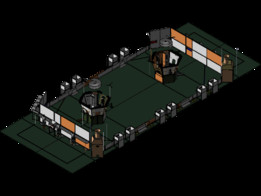
我们的目标是设计一个能够在大多数家庭楼梯上行走的机器人,同时承载至少10磅的有效载荷。11月1日上传的内容包括一个具有静态平衡的6条腿机器人的概念。基本结构在这里,但机器人需要脚上的轮子、腿提升模块的紧固件,以及更好地支持IGUS线性轴承。还没有制造或测试原型
标签:
------分隔线----------------------------
- 上一篇:IBC手提包
- 下一篇:SolidWorks教程:自定义传动系以添加球收集器

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :6.74 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,Other,SOLIDWORKS,SOLIDWORKS,Rendering,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOLIDWORKS,SOL