用于3D打印的简易机器人SCARA
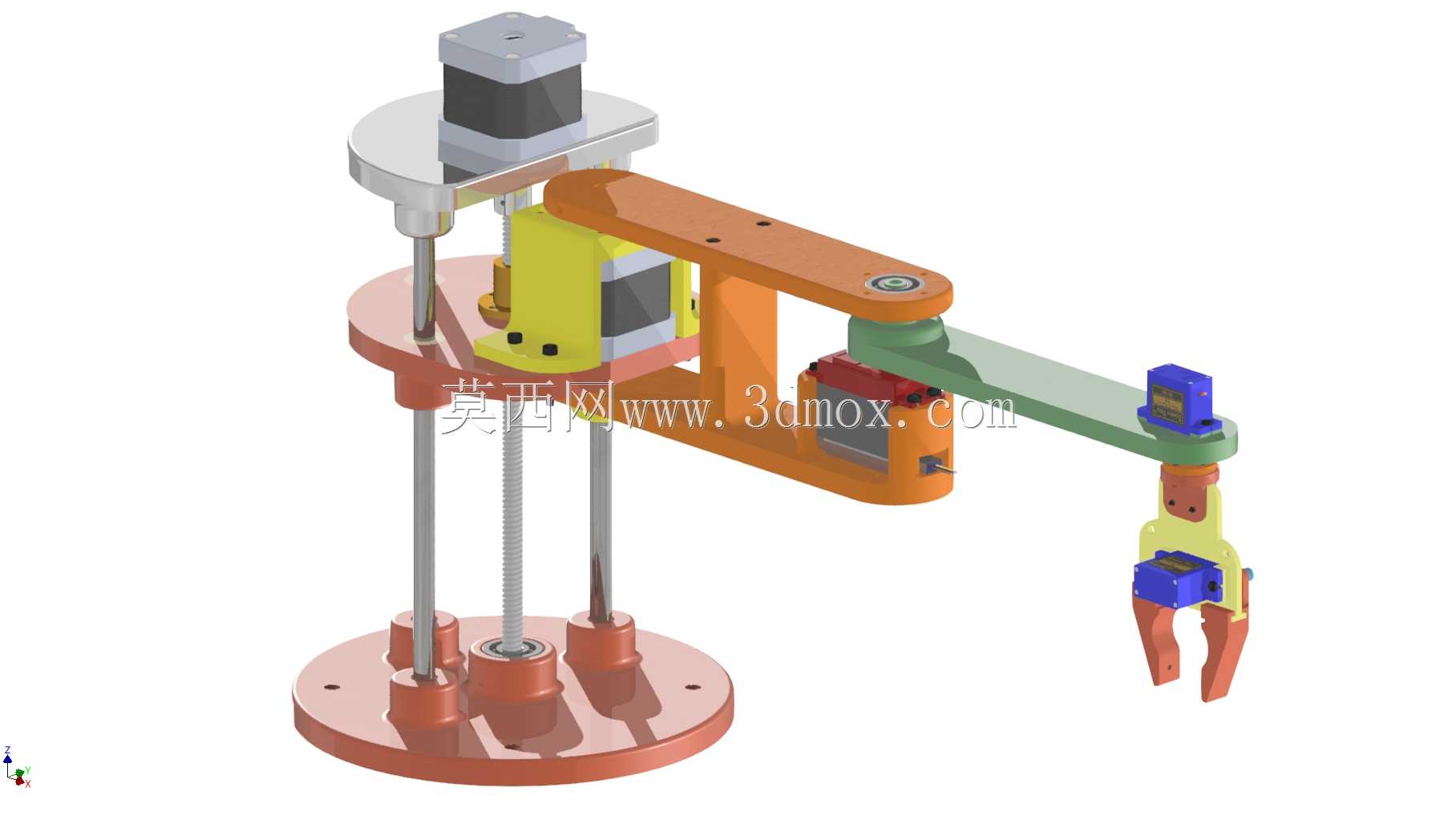
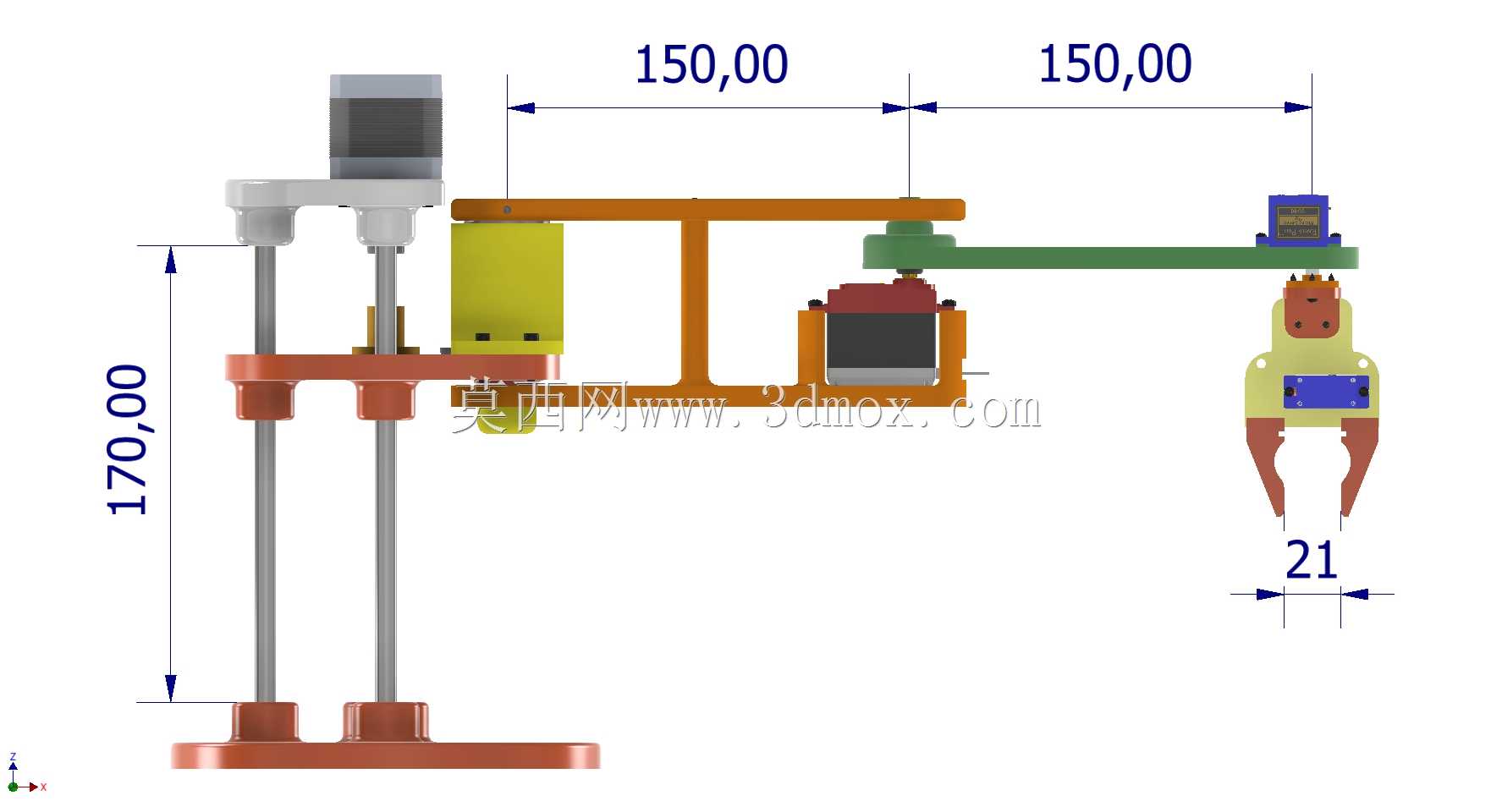
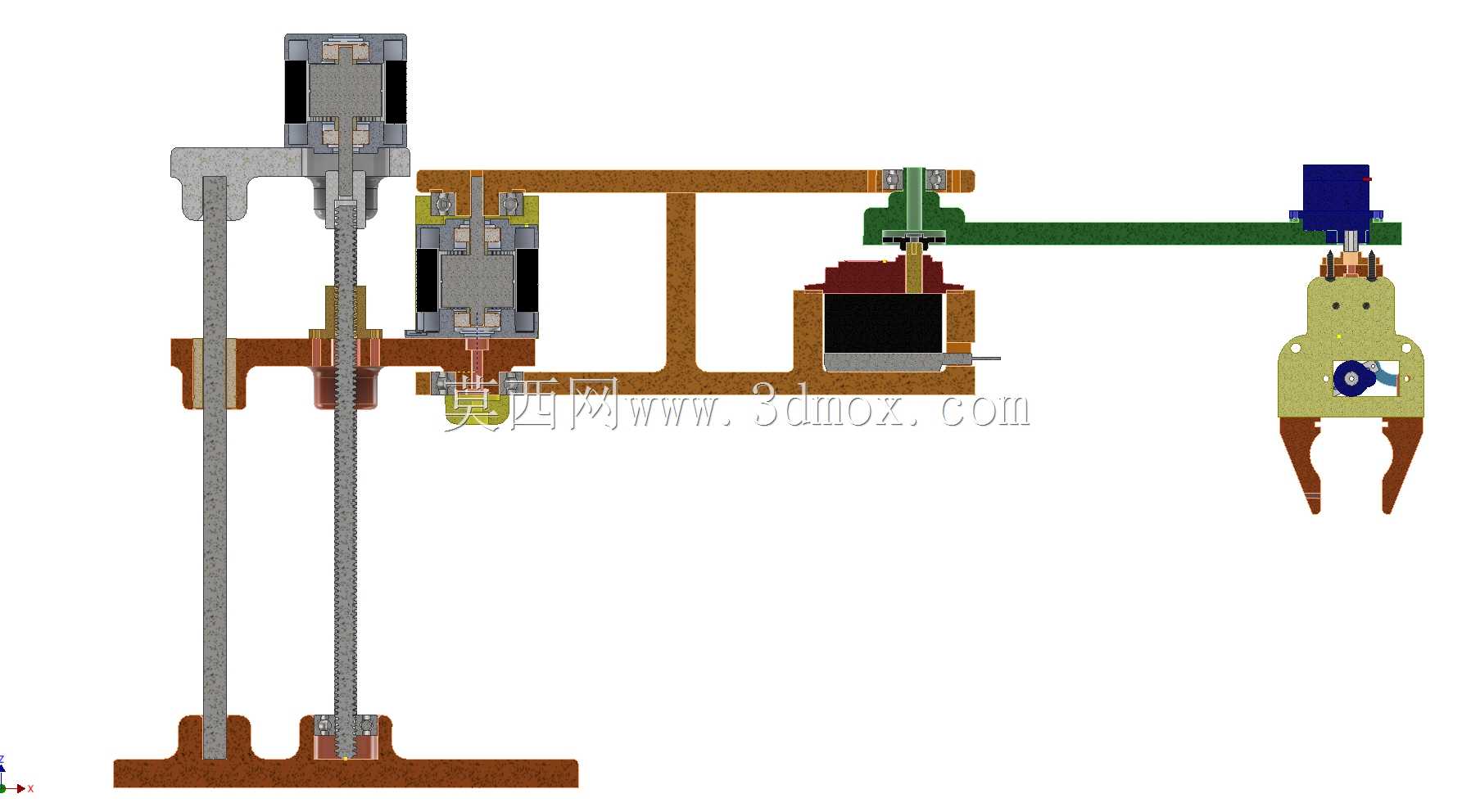
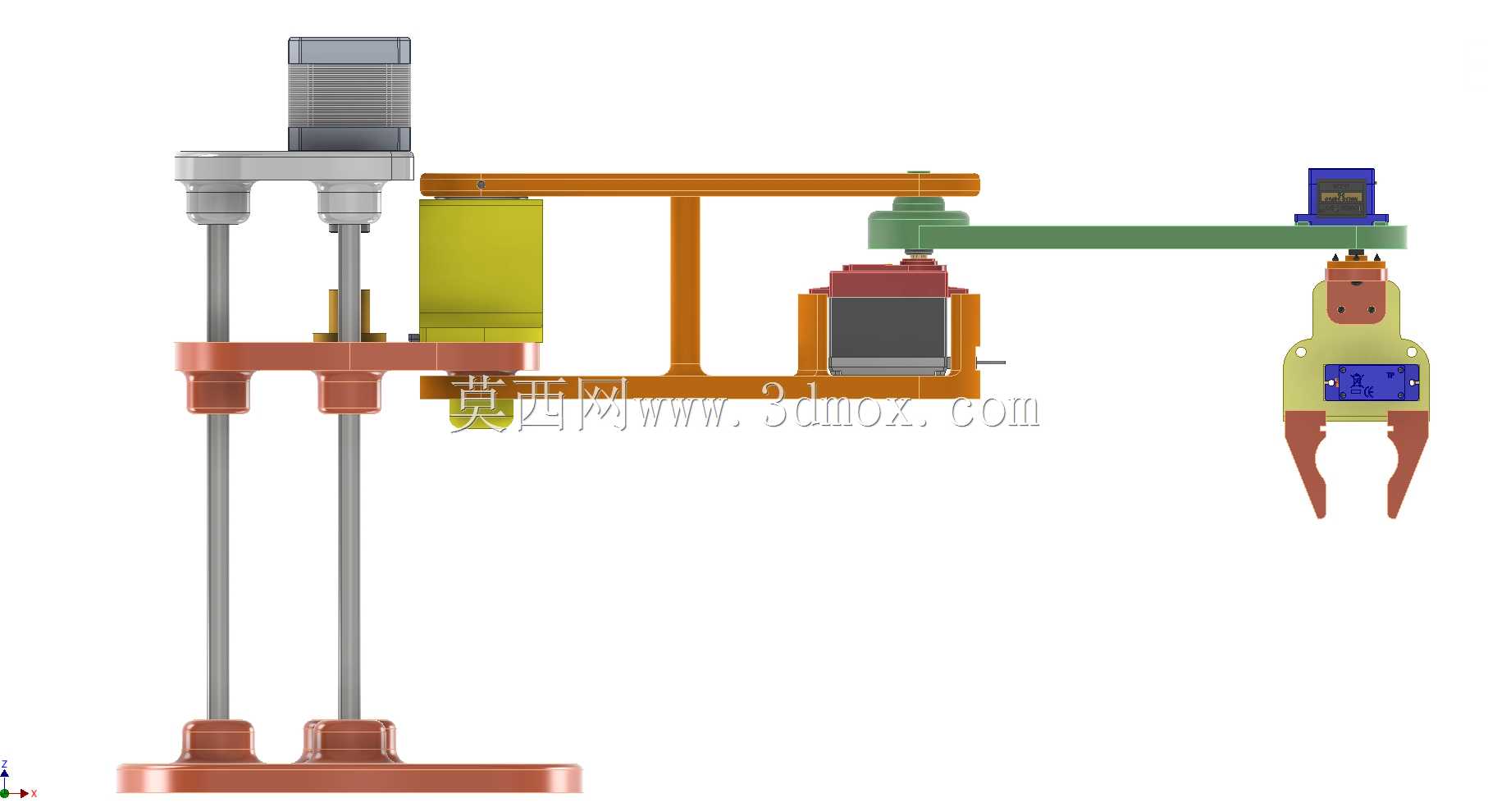
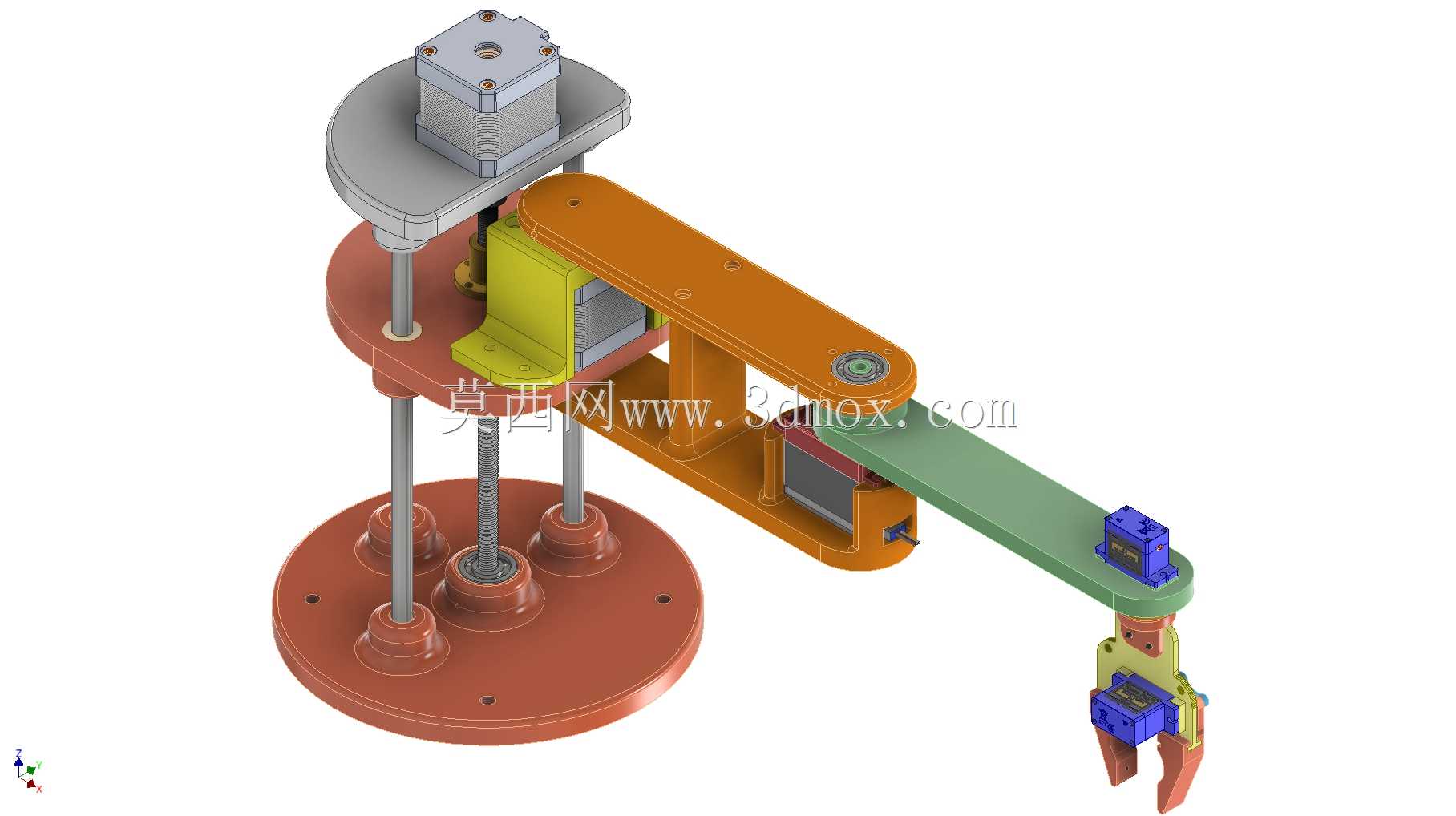
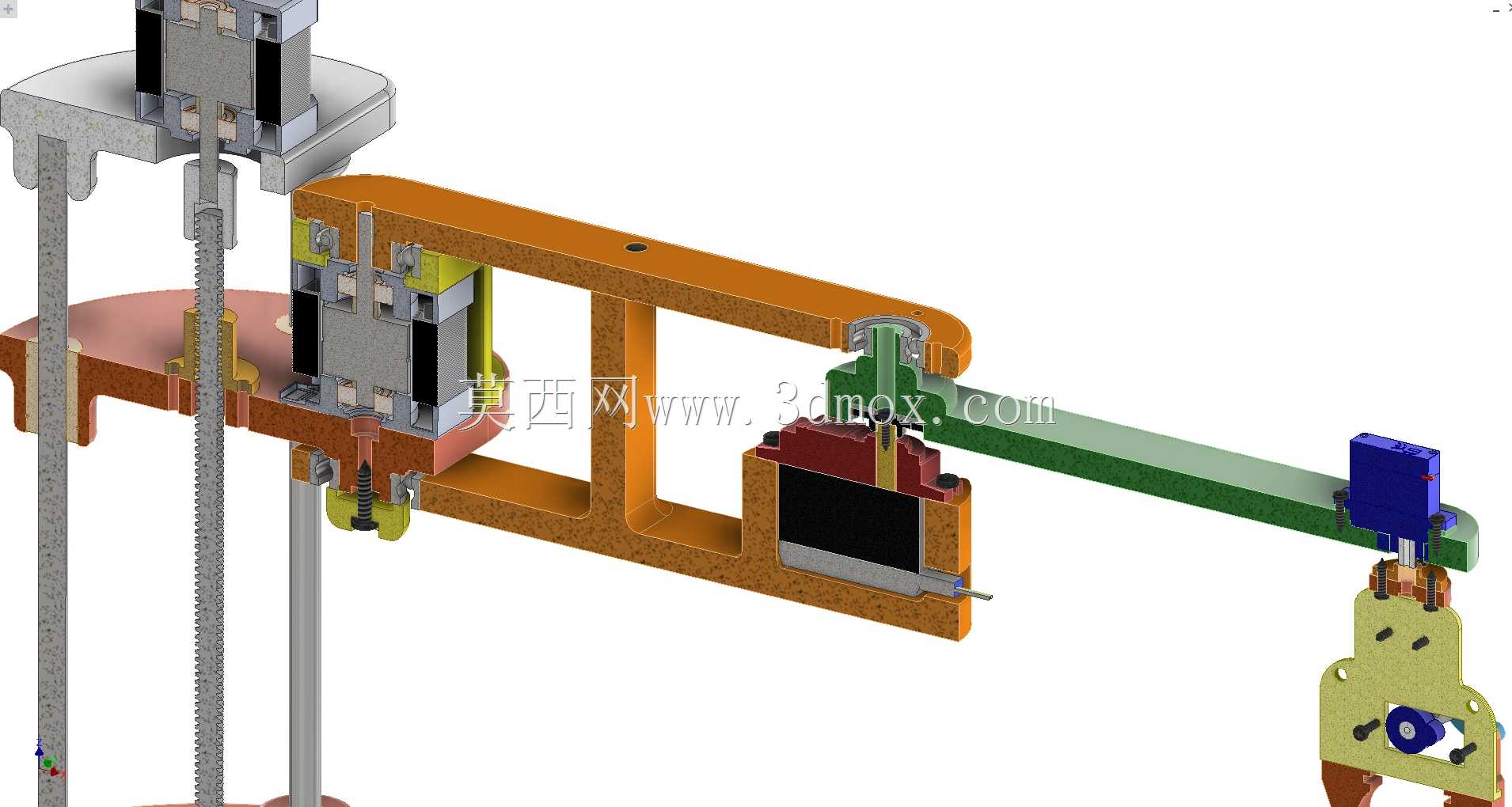
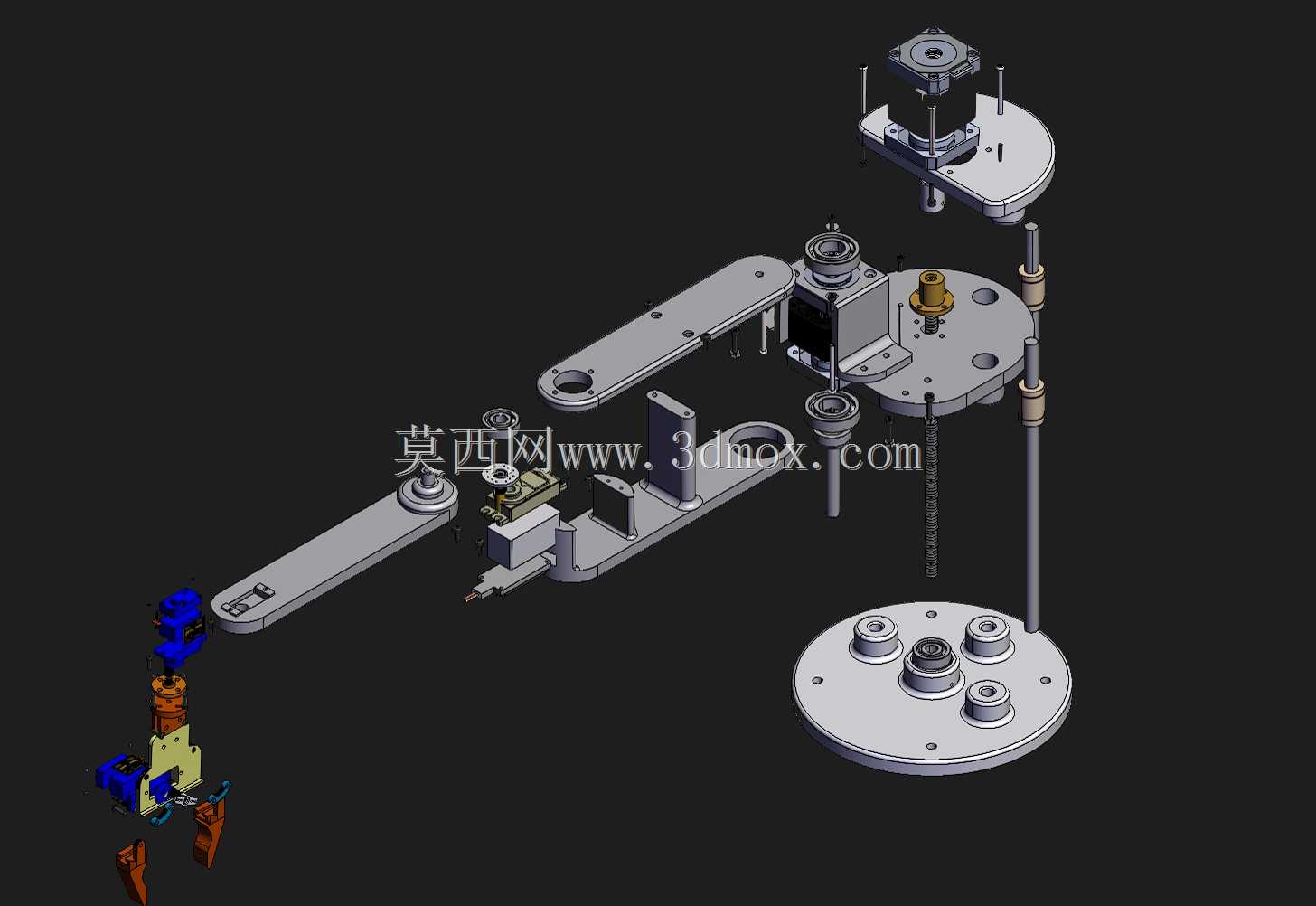
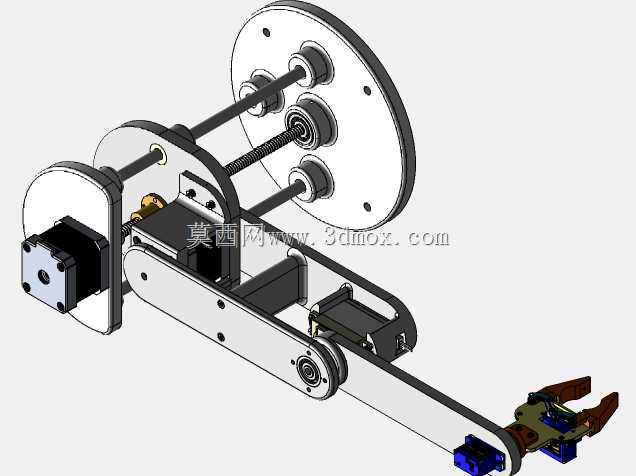
介绍低成本SCARA机器人的平面运动学研究。为无支架3D打印而优化的零件。使用轴支撑轴承进行直线运动。在光杆上使用直线轴承进行垂直运动。在终端连杆上使用伺服20Kg,以减少所涉及的质量,并避免使用齿带
------分隔线----------------------------
- 上一篇:气动拟人机器人
- 下一篇:带ESP32/Arduino的伺服阀

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :12.89 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,STEP / IGES,Rendering