拟人机器人以最小支撑进行3D打印。
机器人教学。拟人机器人以最小支撑进行3D打印。底座采用NEMA 17步进电机和齿轮。底座上有两个20Kg/cm伺服装置,用于增加提升负载(约300g)。手臂和手腕上有20Kg/cm伺服装置。将两个2Kg/cm微型伺服装置安装到夹具上


- 模型大小 :13.76 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering


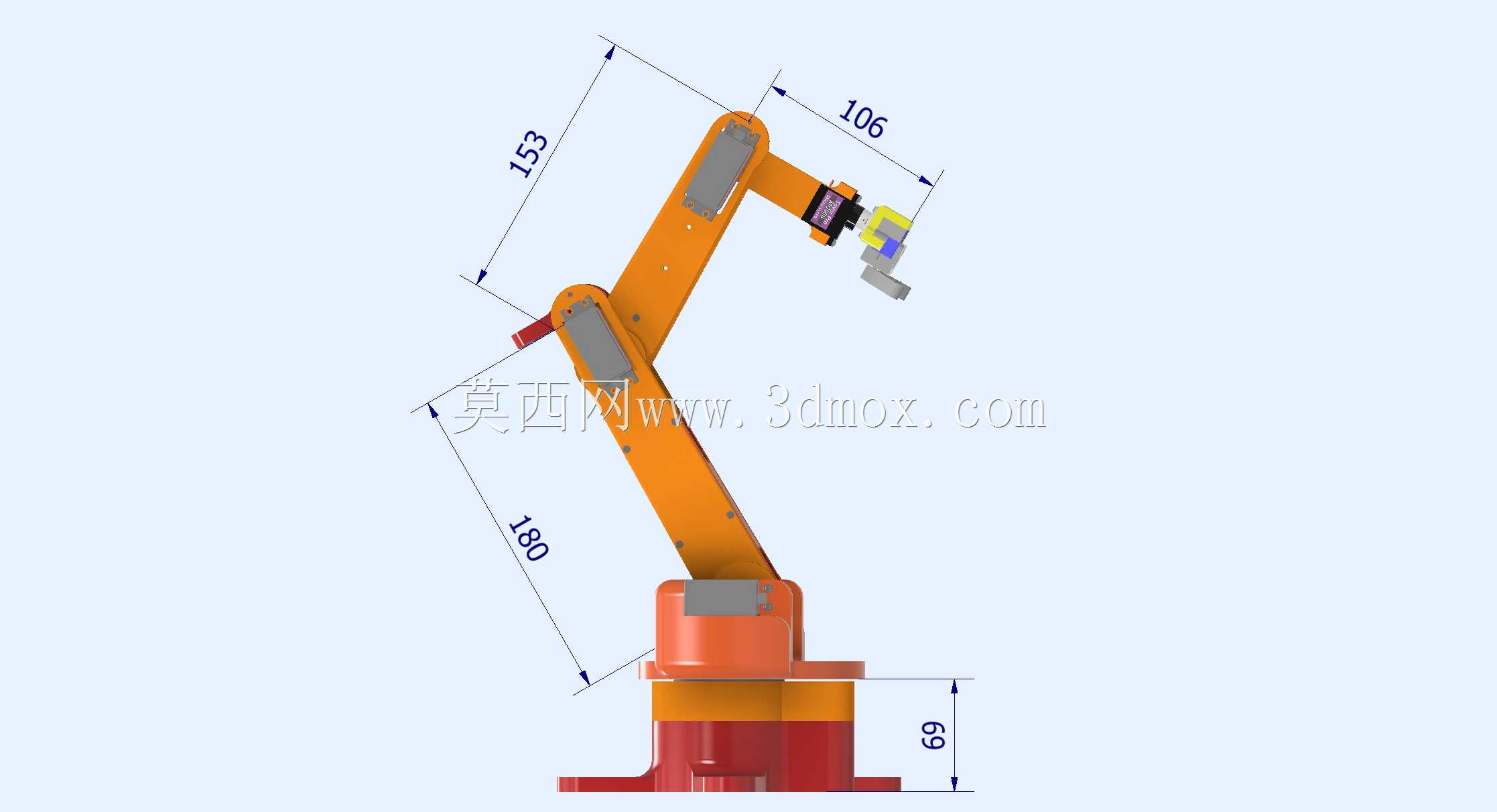

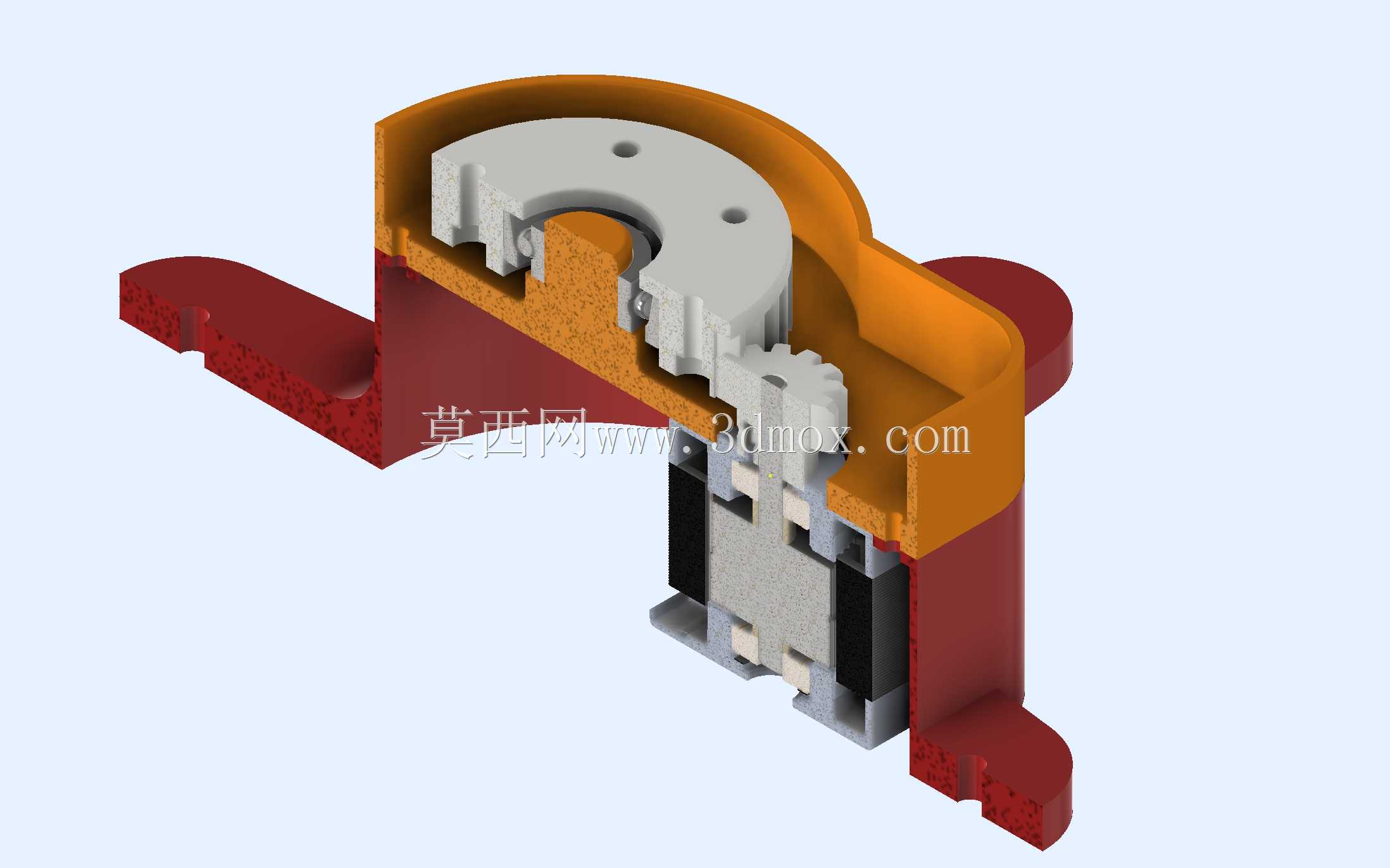
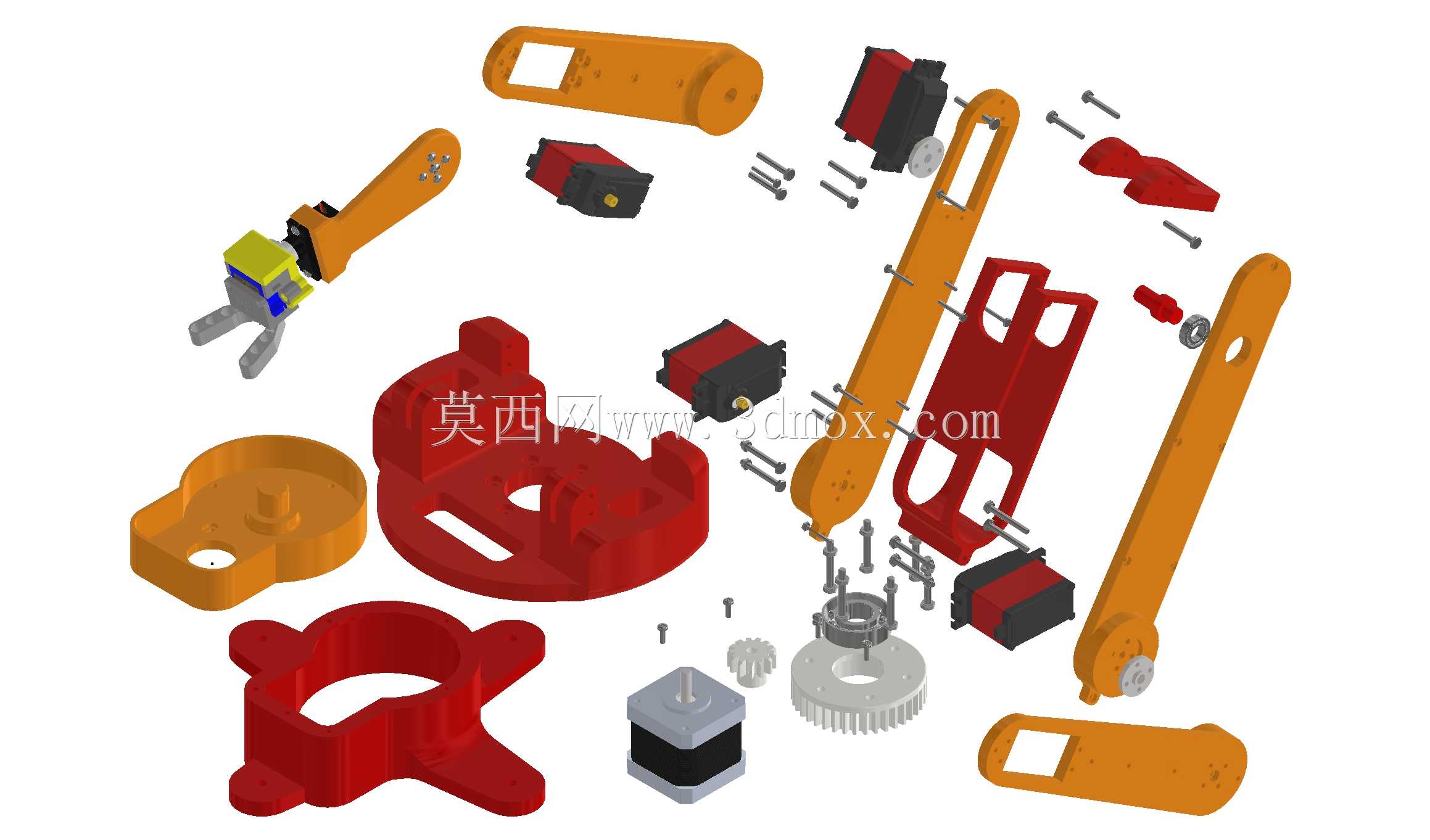
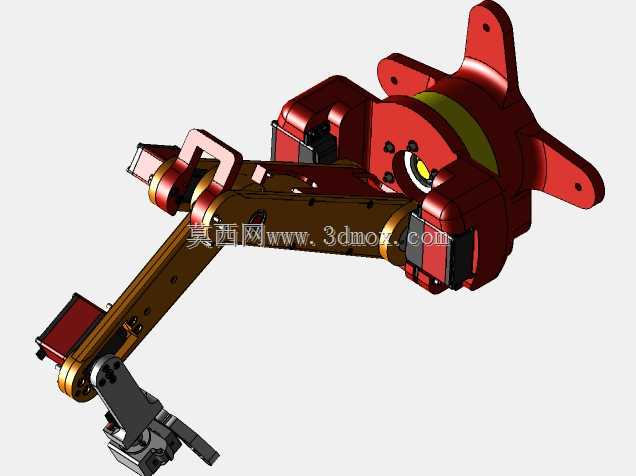
机器人教学。拟人机器人以最小支撑进行3D打印。底座采用NEMA 17步进电机和齿轮。底座上有两个20Kg/cm伺服装置,用于增加提升负载(约300g)。手臂和手腕上有20Kg/cm伺服装置。将两个2Kg/cm微型伺服装置安装到夹具上