手臂机器人
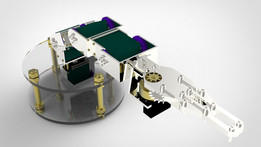
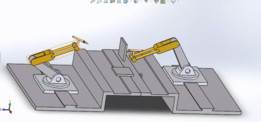
当我完成学士学位时设计机器人手臂。我用一个尽可能简单的设计制作了这个机械臂,有两个丙烯酸树脂,四个螺栓;12个螺母&;对于使用标准&;连续伺服电机
标签:


- 模型大小 :1.26 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Other,Rendering

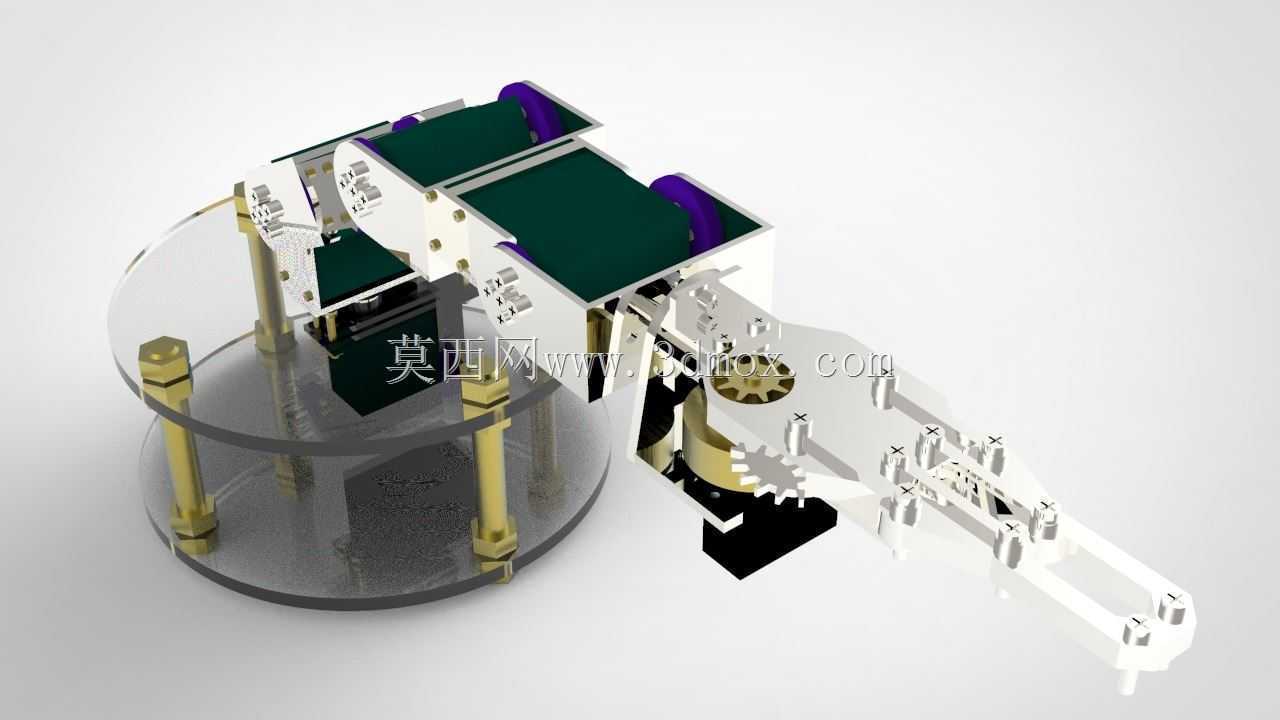

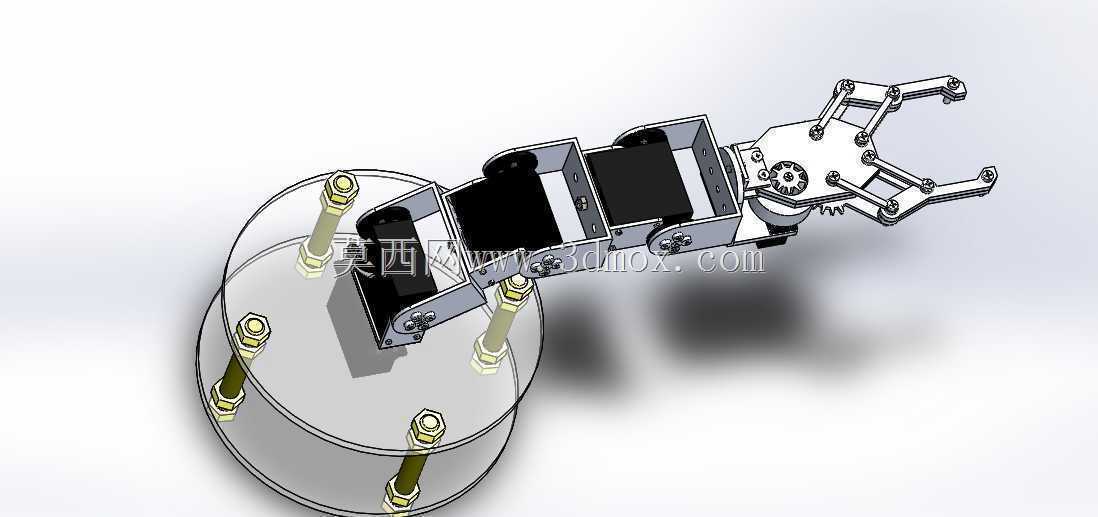
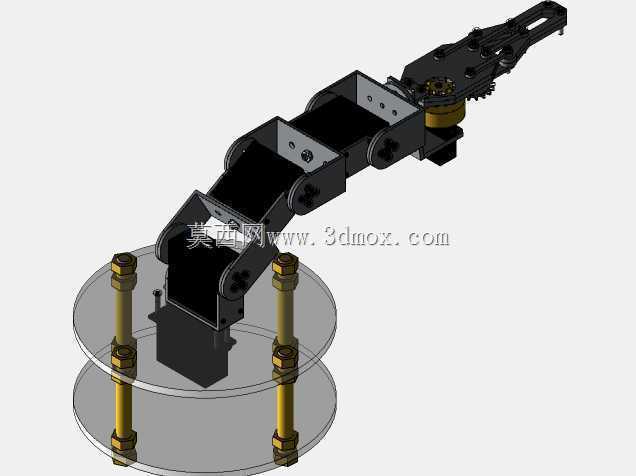
当我完成学士学位时设计机器人手臂。我用一个尽可能简单的设计制作了这个机械臂,有两个丙烯酸树脂,四个螺栓;12个螺母&;对于使用标准&;连续伺服电机