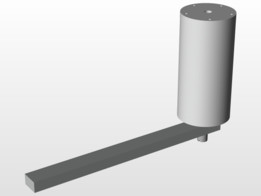
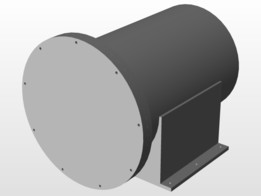
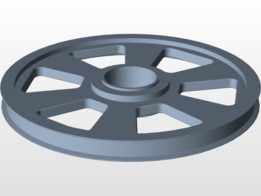
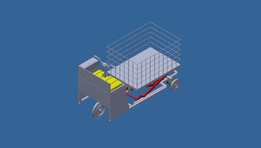
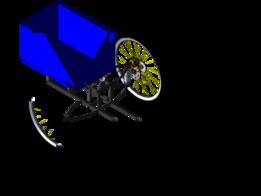
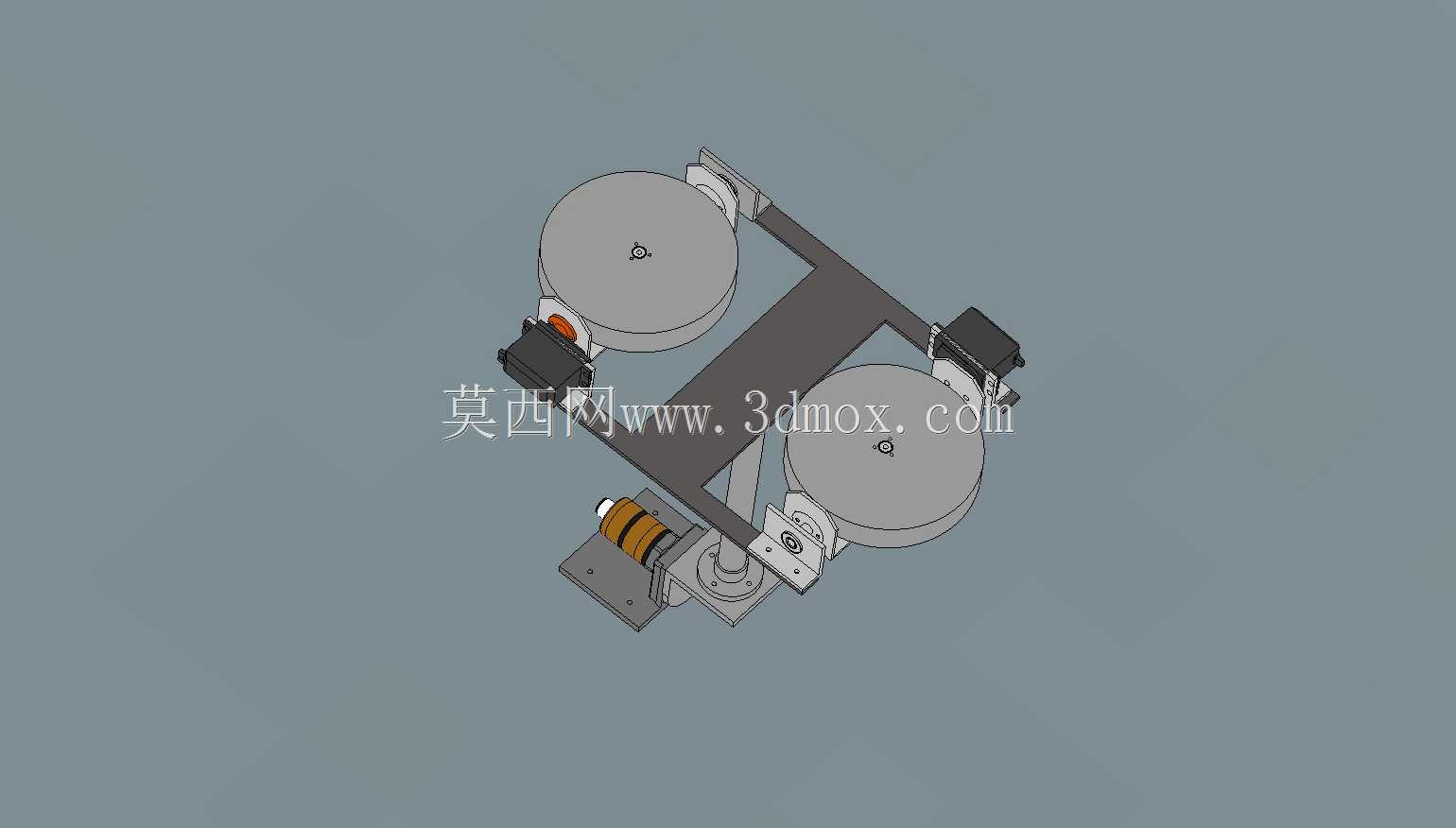
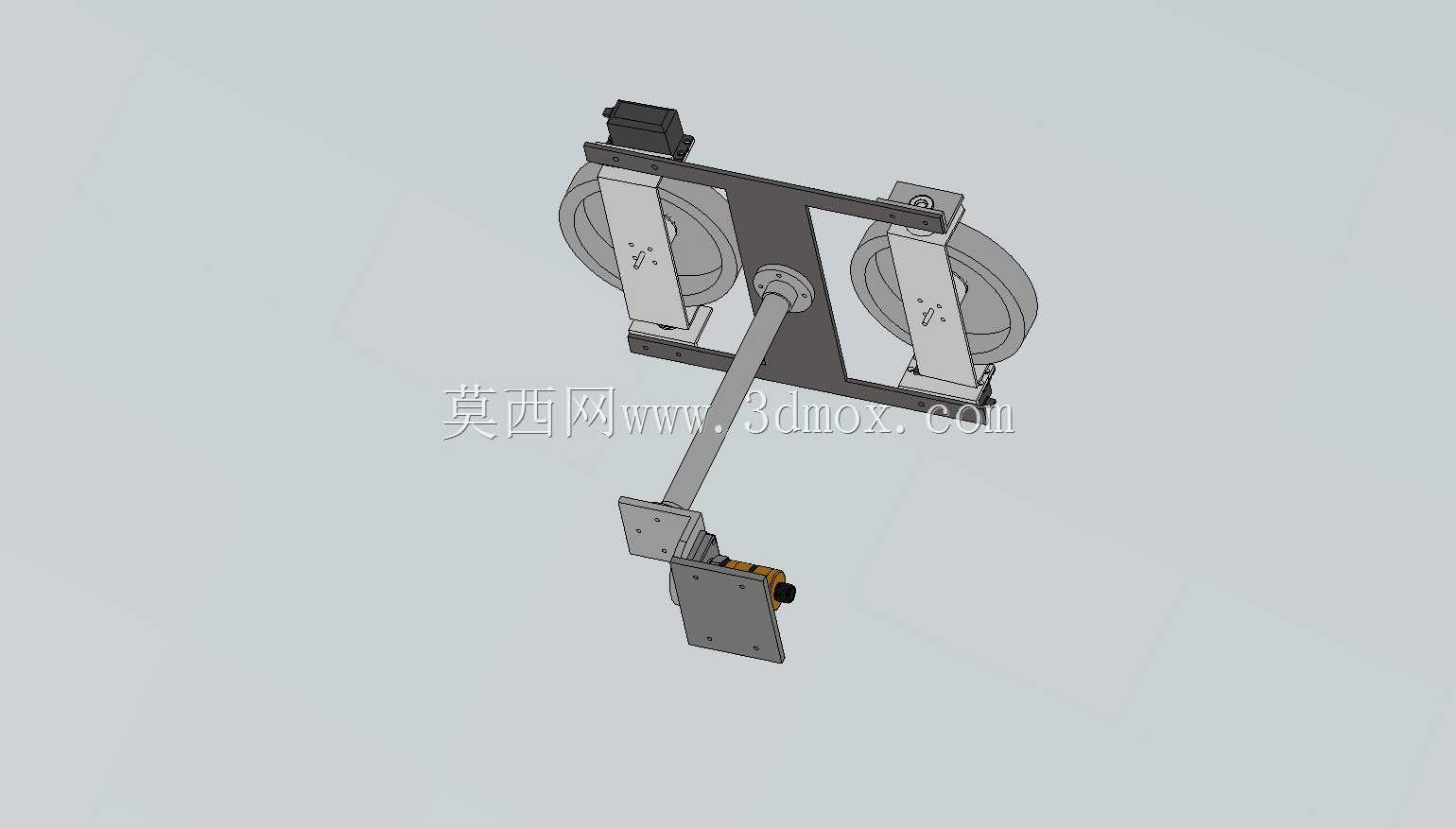
利用扭转陀螺轮控制倒立摆
提出了一种利用扭转回转轮稳定小型机器人或倒立摆的控制系统。传统的惯性轮稳定器利用作用反作用力/力矩来控制摆锤,可以产生相对较小的力矩和较短的周期
标签:


- 模型大小 :36.32 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor,Other,Rendering





提出了一种利用扭转回转轮稳定小型机器人或倒立摆的控制系统。传统的惯性轮稳定器利用作用反作用力/力矩来控制摆锤,可以产生相对较小的力矩和较短的周期