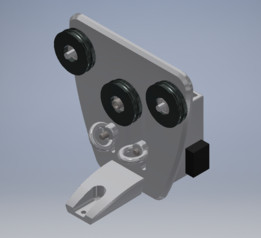
电缆凸轮-项目最终版

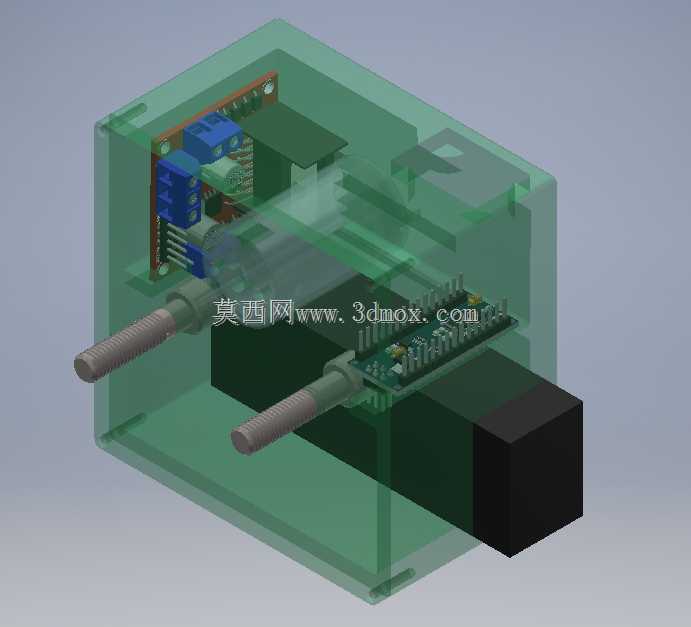
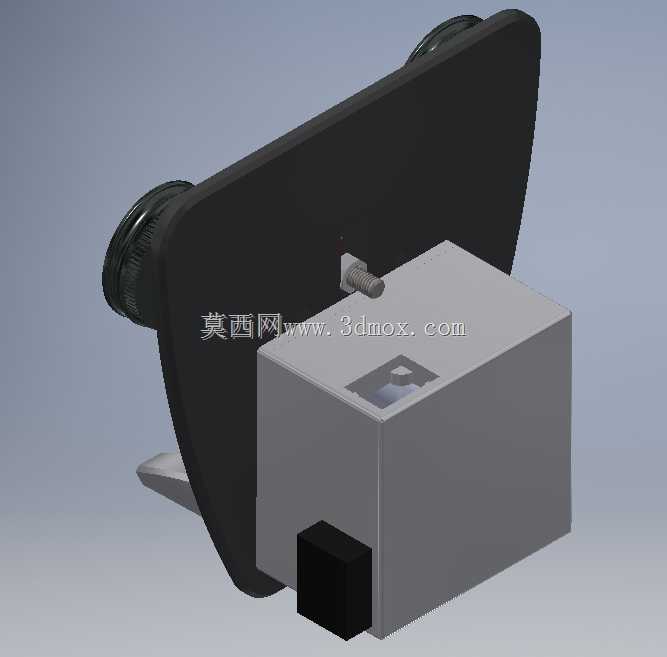

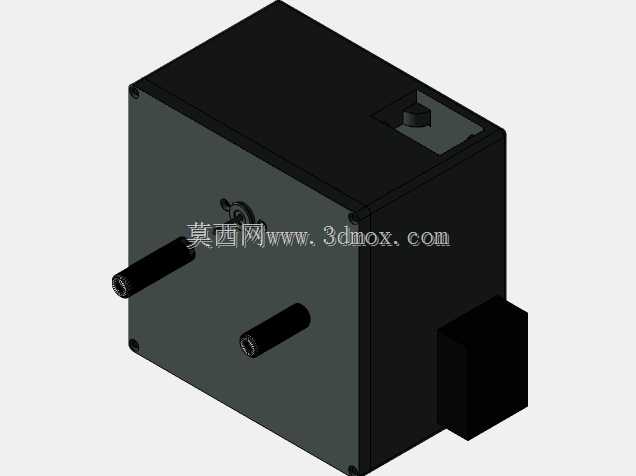




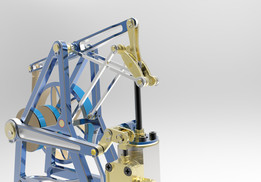
电机控制系统“电缆凸轮”系统的最终制造协议。学生:Armando DuránDavid Esquivel Priscilla VásquezPartes necesarias para ensablaje:-Pernos M8-1.25-Tuercas M8-1.25正常y-ojo-Cojinete 608 zz o类似-Ruedas para polea con diámetro interno de 8 mm-Tornilo para trípode 1/4”-Sistema electr nico:motor DC,driver,arduino nano,Batera LIPO 11.1V,Recibider RF


- 模型大小 :57.95 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Autodesk Inventor,Rendering,SOLIDWORKS,Other,STEP / IGES