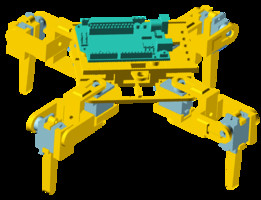
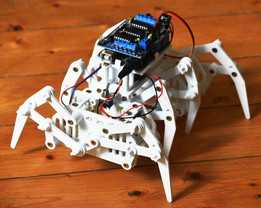
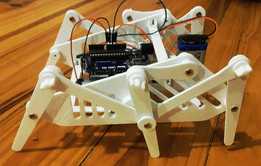
项目“蜘蛛”机器人SP-8
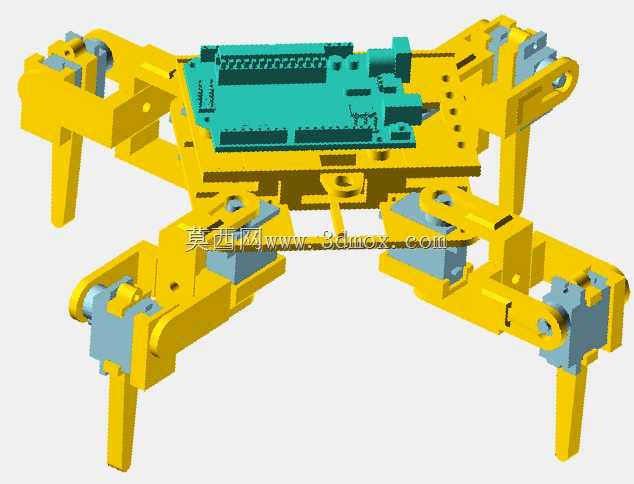
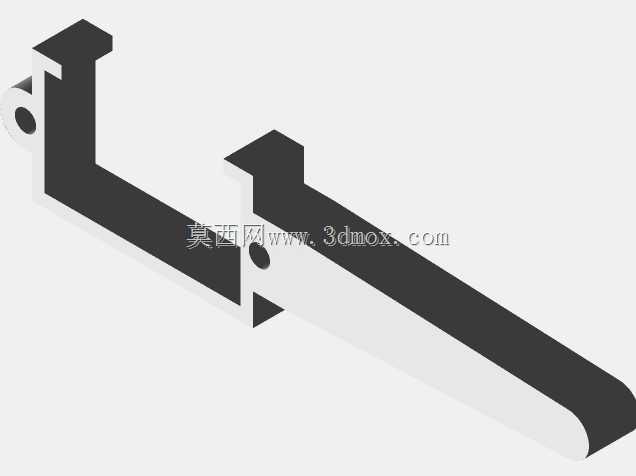



这种“蜘蛛”机器人仅由5个不同的部分组成:肢体固定板和支撑Arduino电路的上板、臂叉(每个臂2个)和脚,以及一个固定伺服的小盒子。机动性由8个伺服装置保证,可向前、向后或转弯(向右或向左)。控制是通过红外控制远程完成的。逻辑由Arduino UNO董事会管理。这些元素使用OpenSCAD软件建模,然后打印在解放军的Creality CR-20 3D打印机上


- 模型大小 :2.74 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Other,STL,Rendering