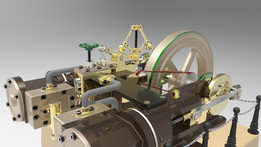
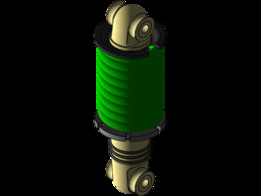
复杂三爪夹持器

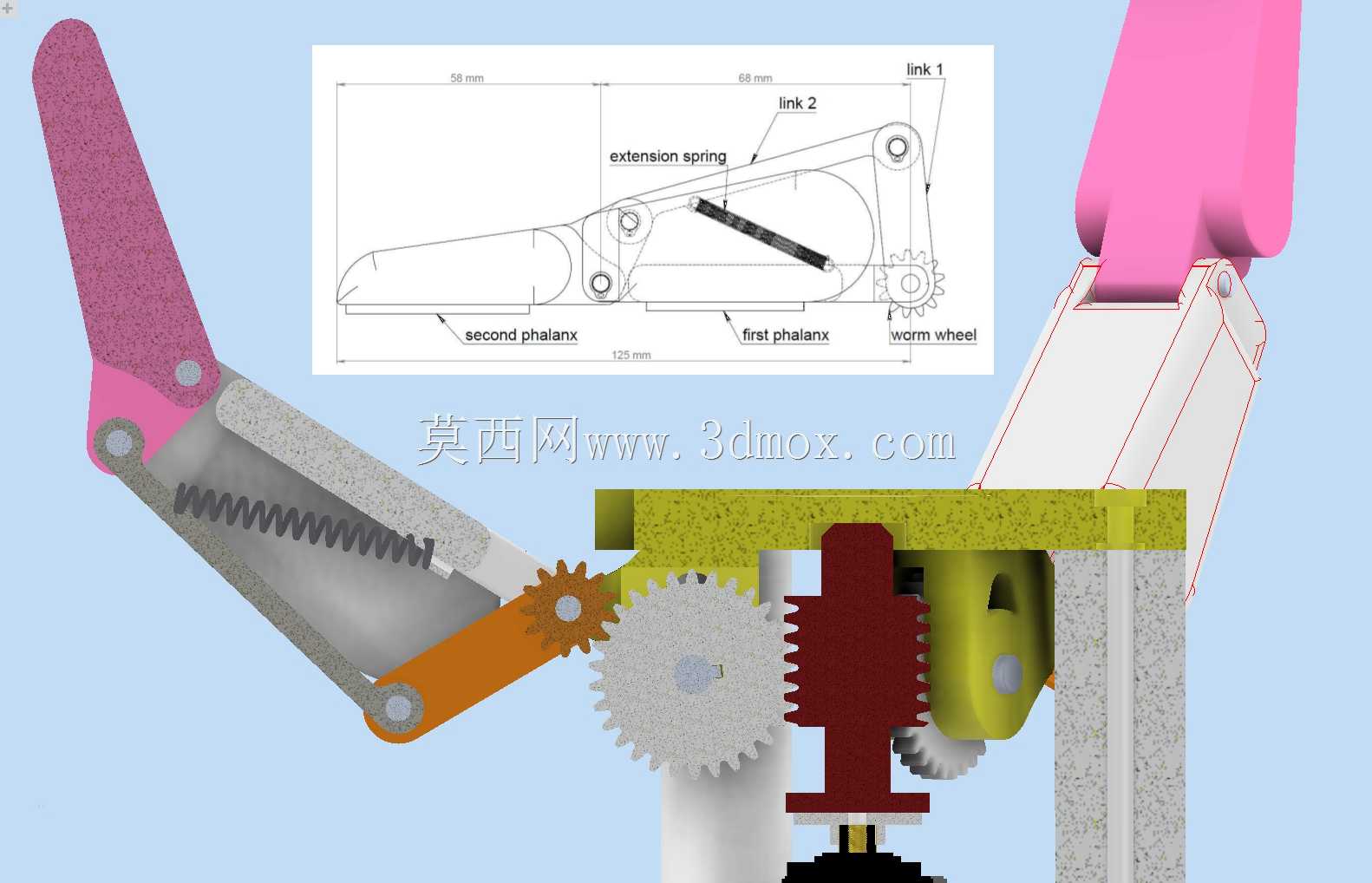
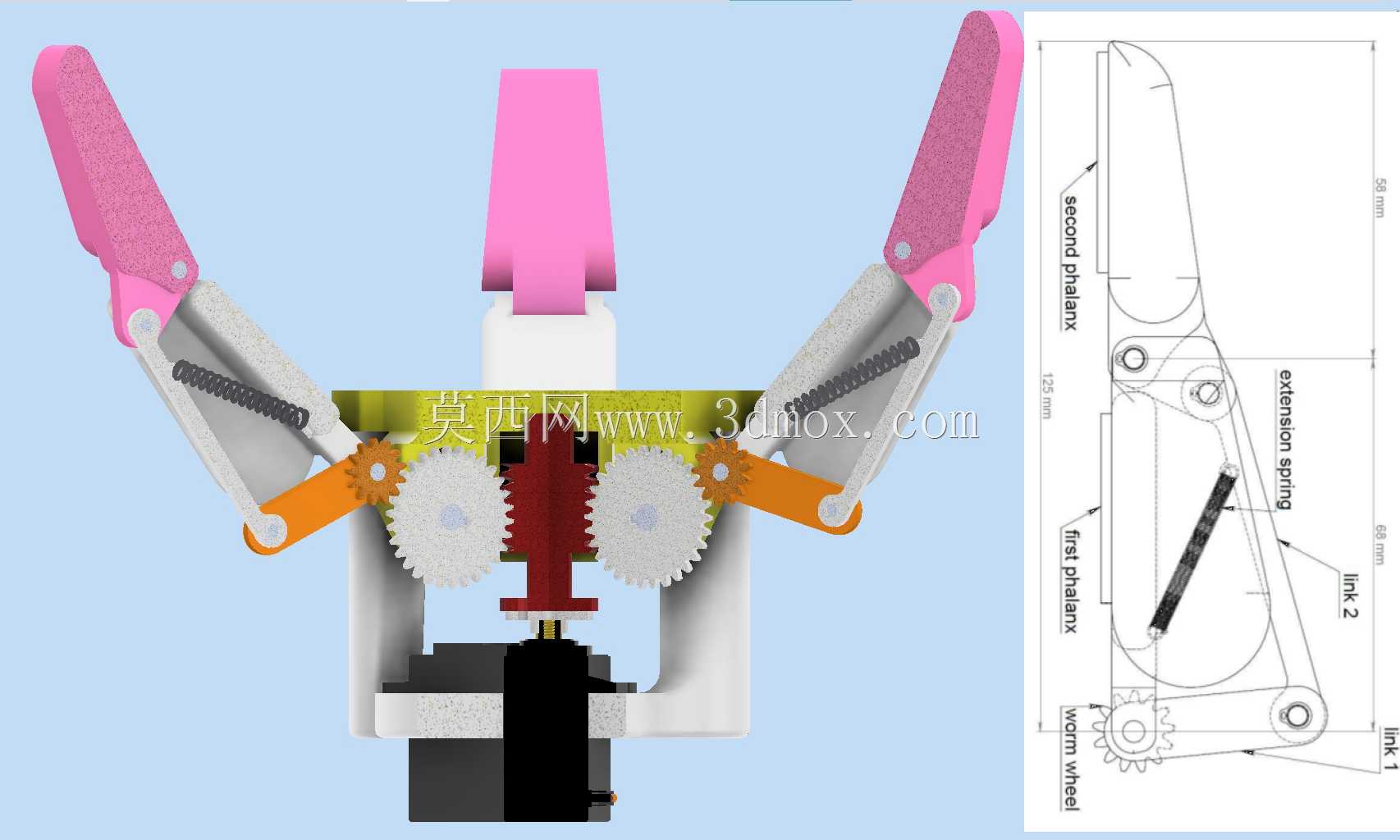


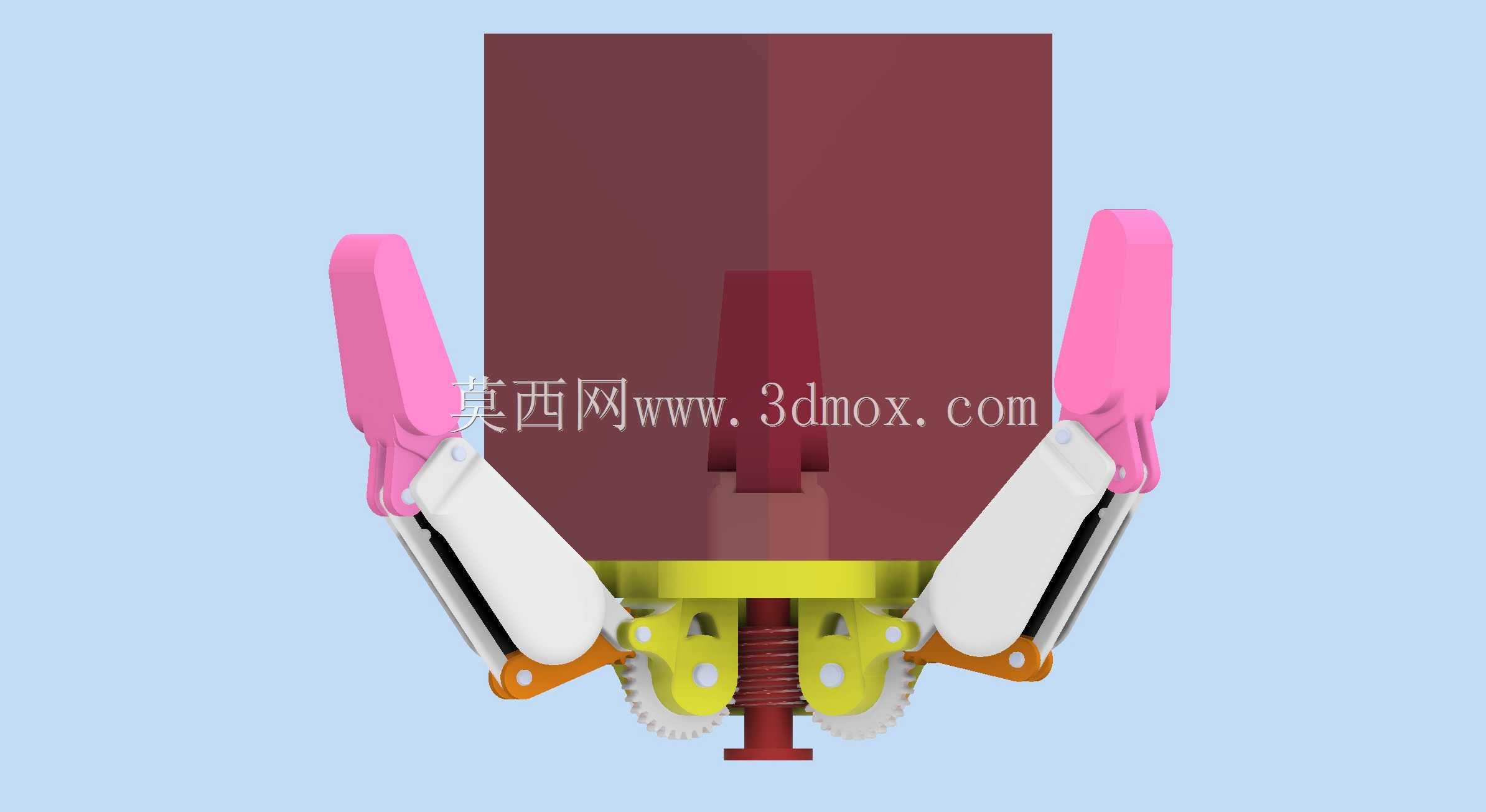
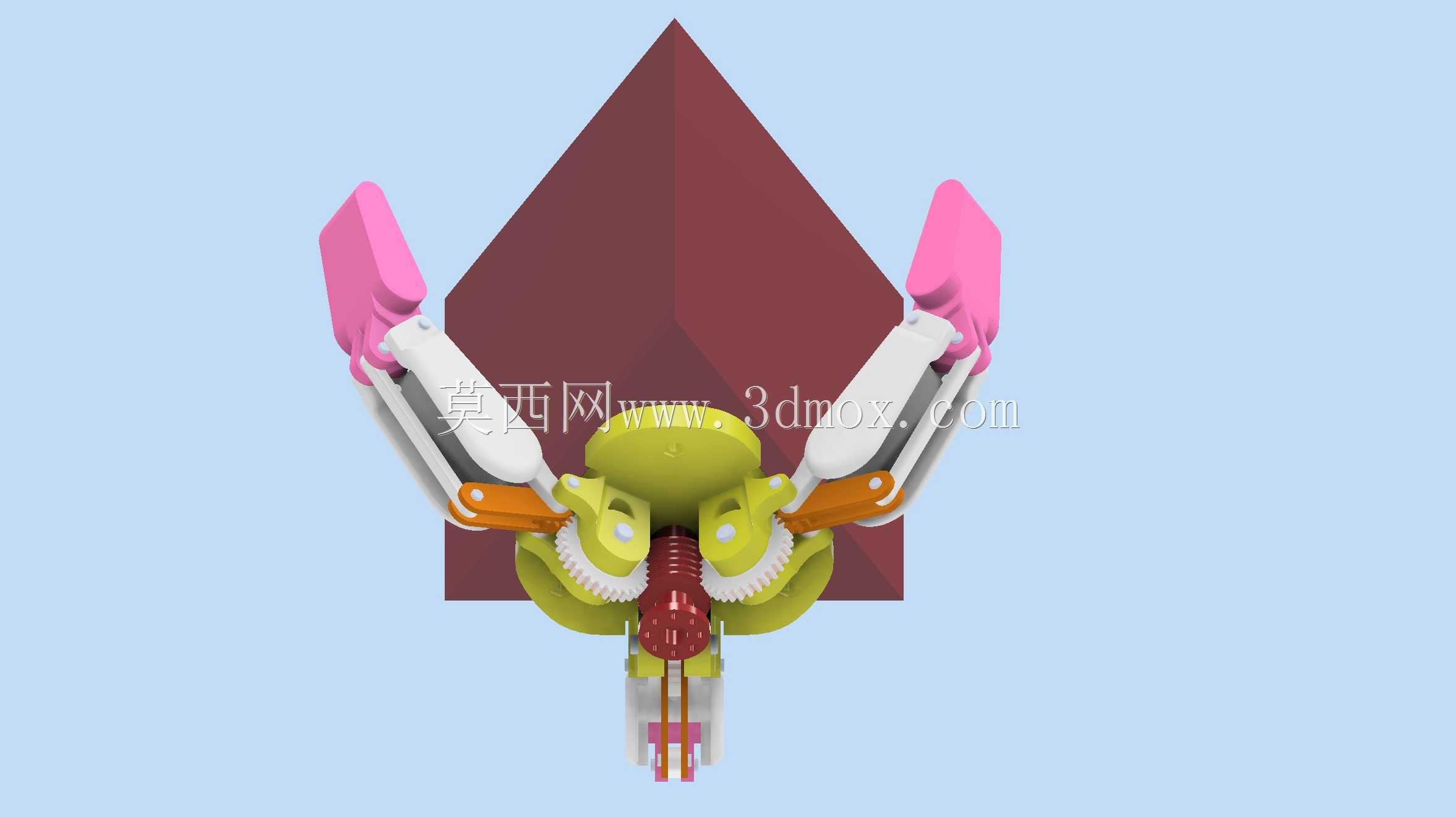

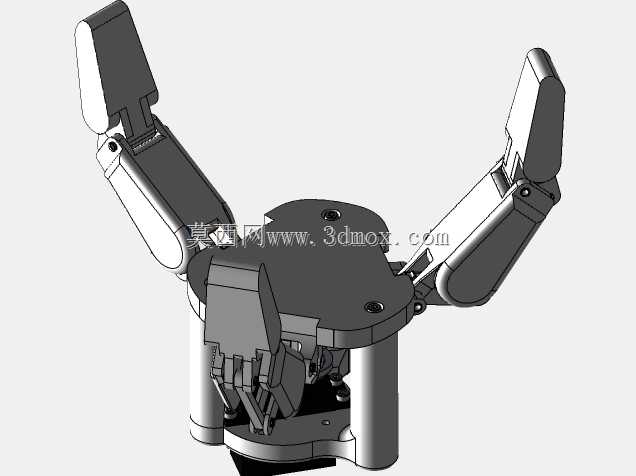
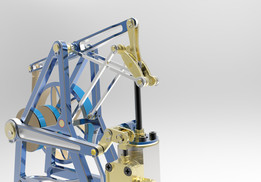
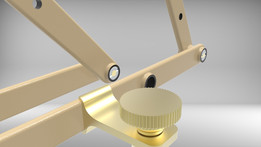
我真的很喜欢这个三颚抓爪:http://www.alaris.kz/research/open-source-3d-printed-underactuated-robotic-gripper/I做了一些改变,使它可以处理一个经典的低成本MG995伺服。我不得不修改link2以获得更好的对称性,这在原始文件中是不可能的。铰接系统相当复杂(这里是详细信息)http://www.alaris.kz/wp-content/uploads/2014/10/MESA14_114.pdf).所有动作都是在连接2和指骨之间有弹簧的情况下进行的。如果没有弹簧,动画将无法实现预期效果


- 模型大小 :13.64 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering