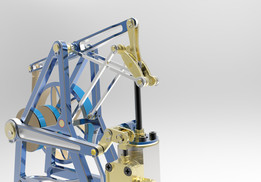
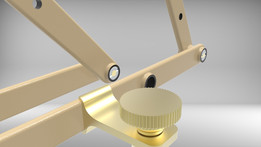
微型机器人scara MG995和M5夹持器。
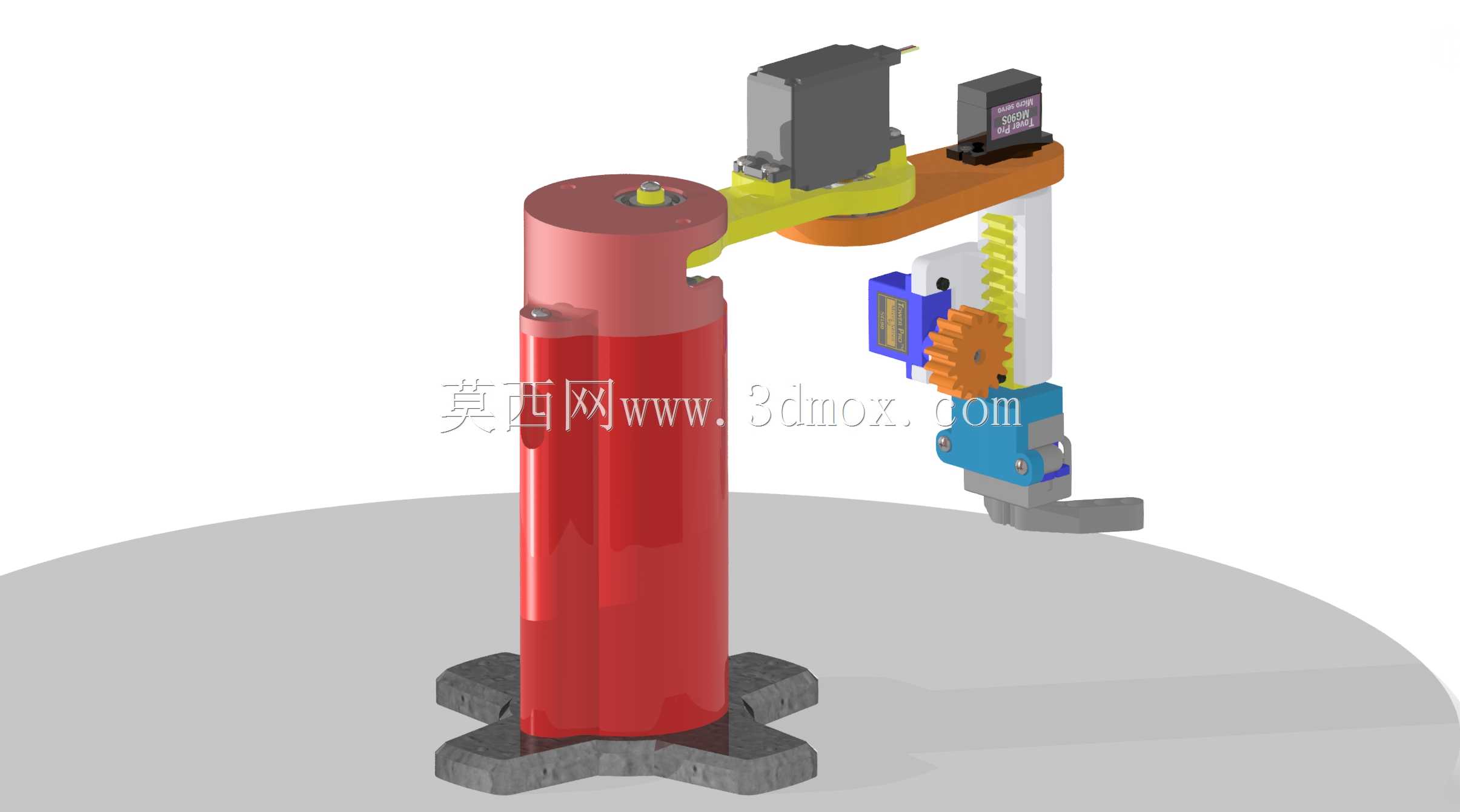
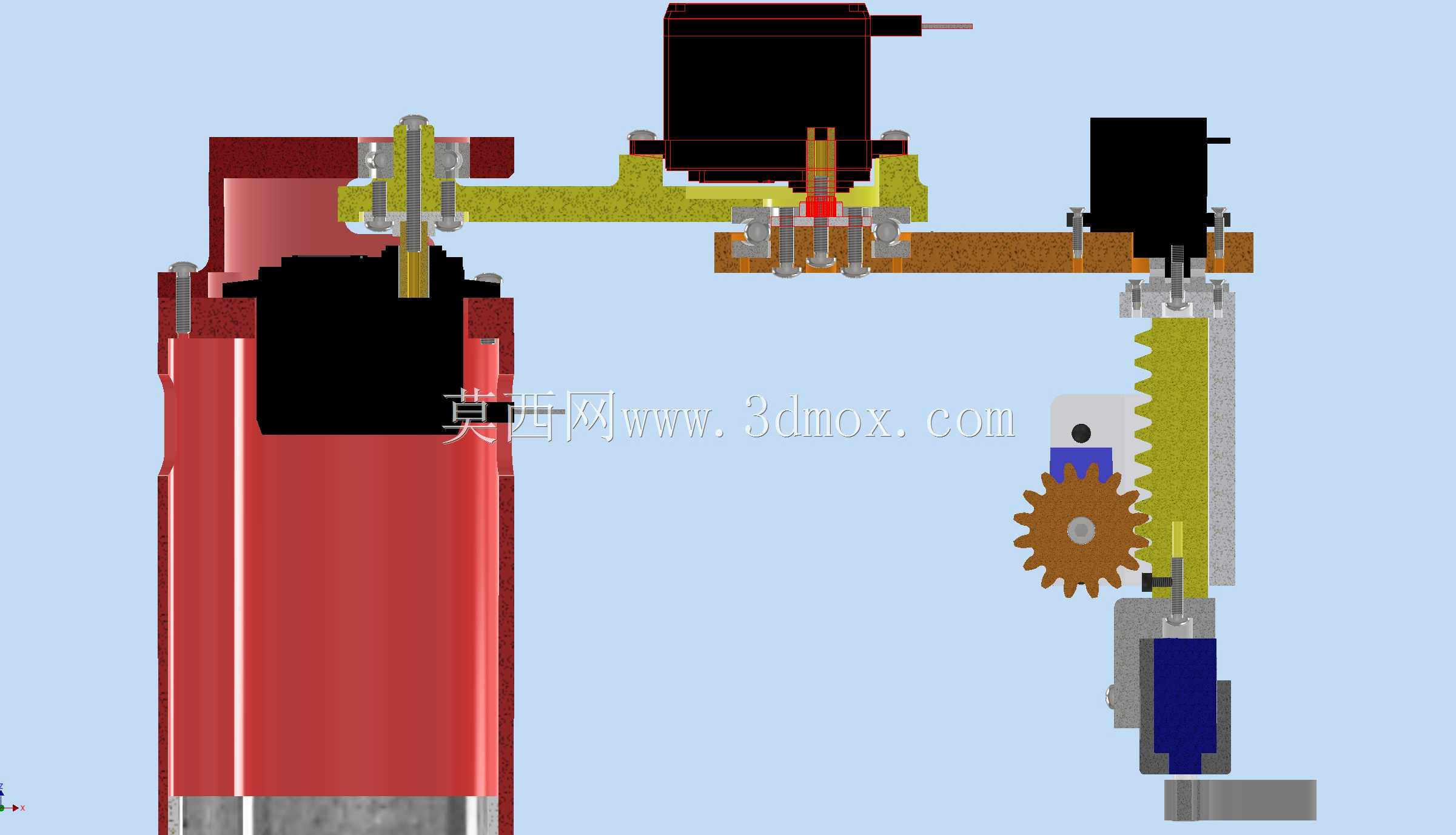

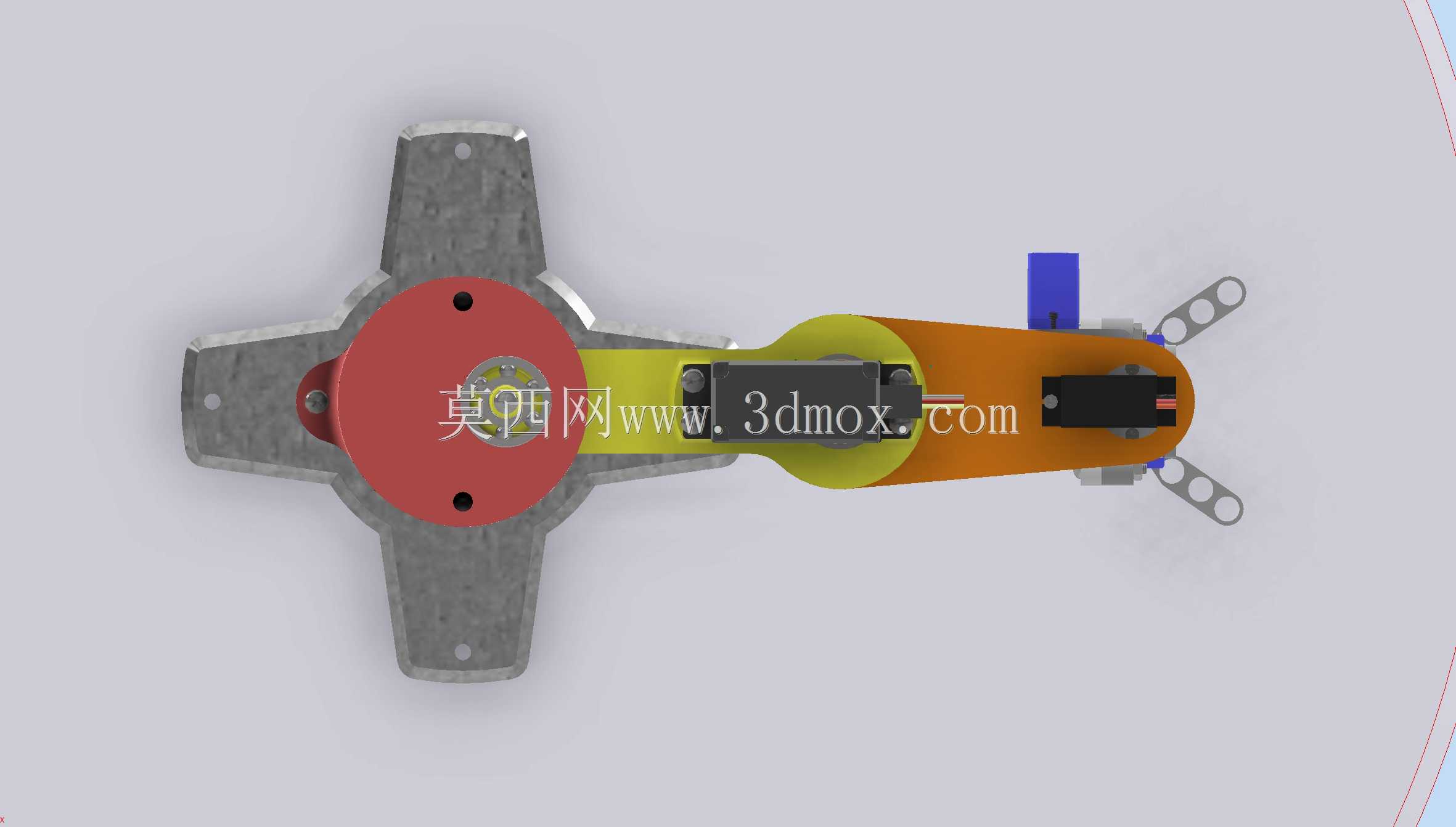



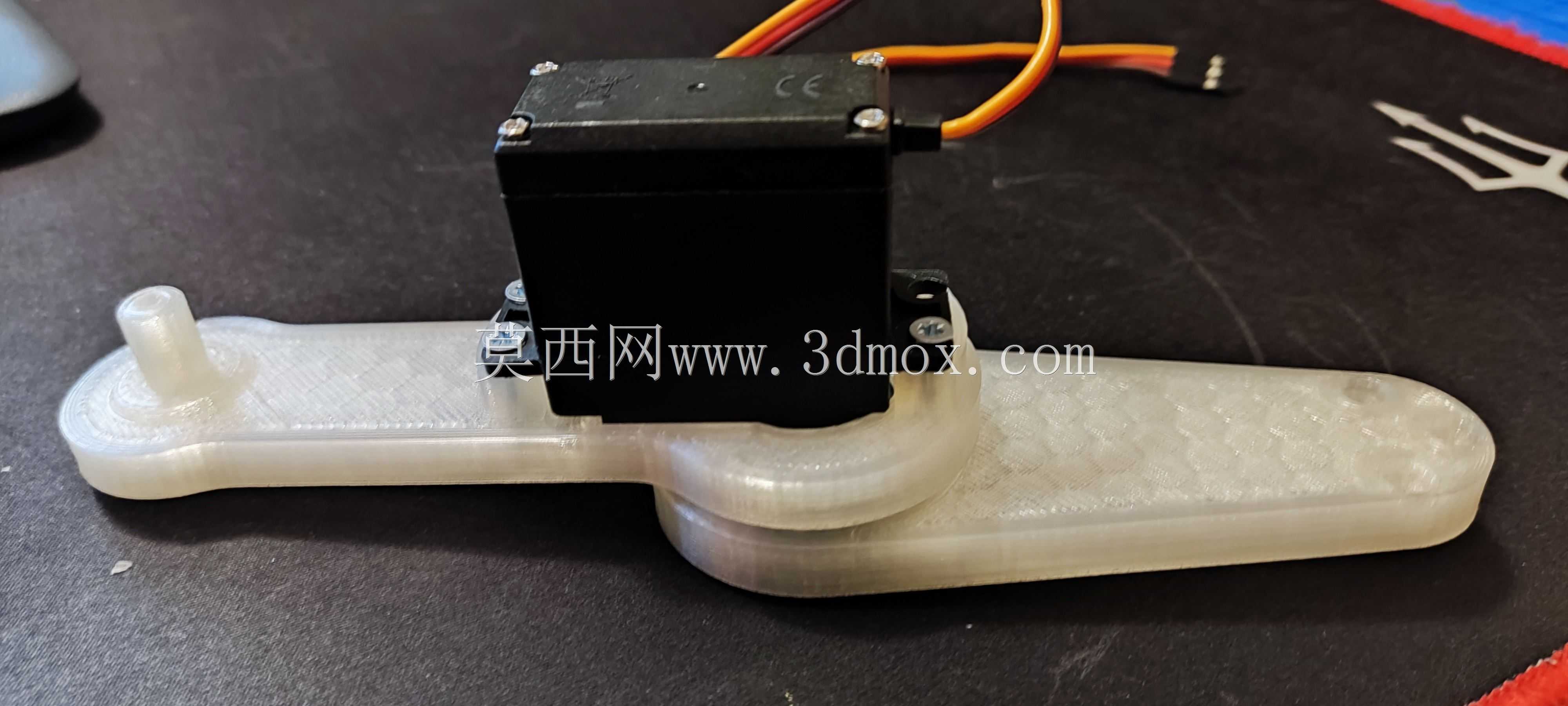
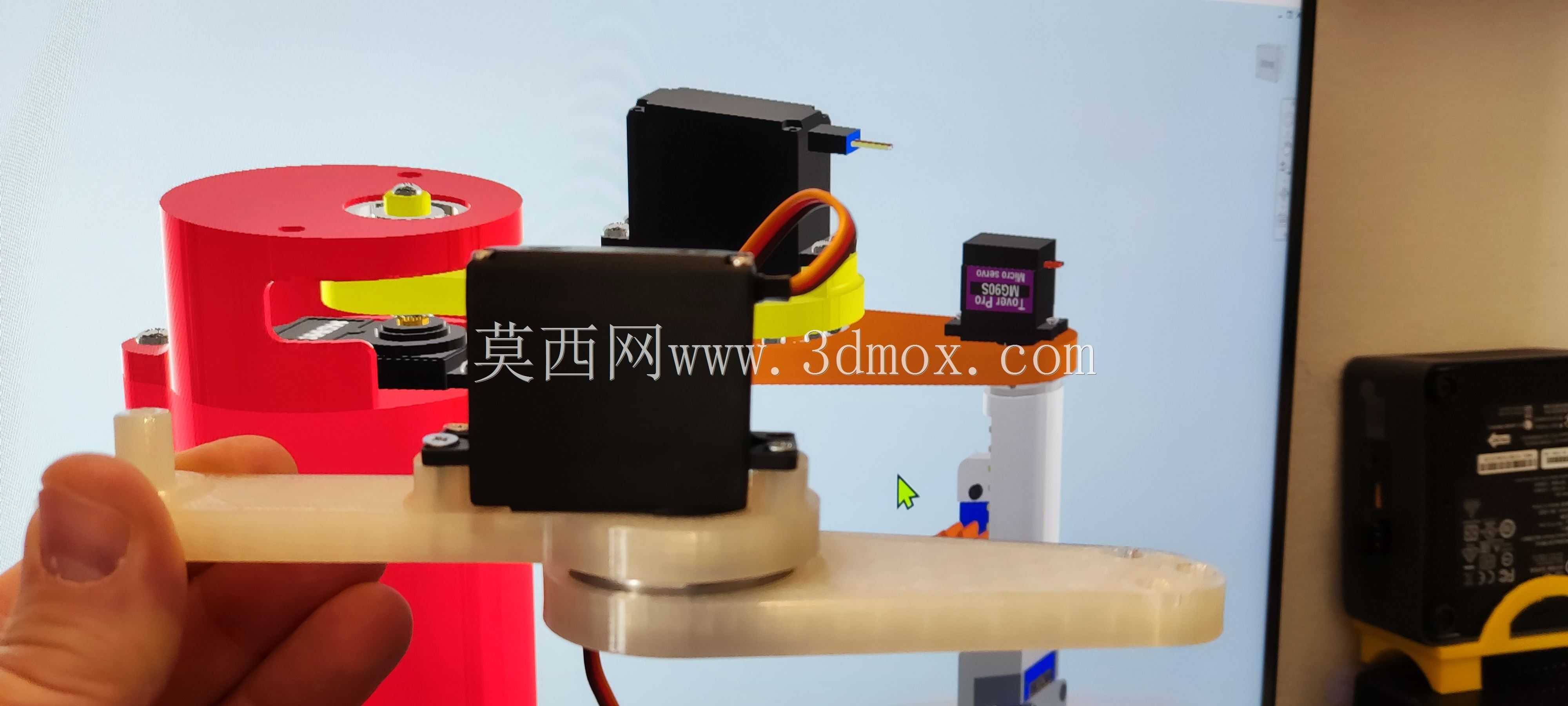
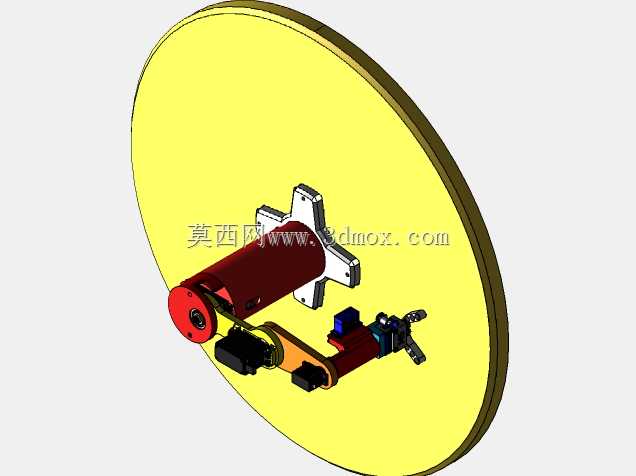
微型机器人scara MG995和M5夹持器。适用于机器人正反向平面运动学的初步研究。它使用齿轮齿条机构来移动垂直轴。两个MG995伺服调节飞机上的定位。M5堆叠夹持器套件(例如。https://www.distrelec.de/en/sg92r-catch-unit-robotic-gripper-m5stack-u102/p/30221922).MG90S伺服调节夹持器的旋转。由于使用了轴向和径向滚珠轴承,机器人坚固紧凑。适合3D打印,易于组装
------分隔线----------------------------
- 上一篇:微型机器人scara MG995,带气动吸盘。
- 下一篇:微型机器人斯卡拉MG995

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :20.29 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering