WRO机器人
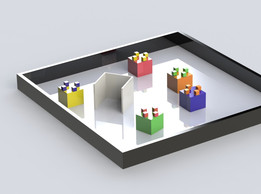
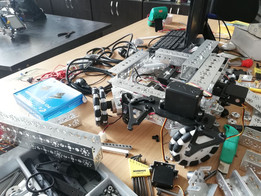
我创建这个机器人是为了参加2019年世界机器人奥林匹克运动会。这种全轮机器人是用Tetrix硬件制造的,目的是实现完整的驱动系统,它有两个手臂,可以展开并握住立方体,然后回到自己的位置
标签:


- 模型大小 :3.33 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering

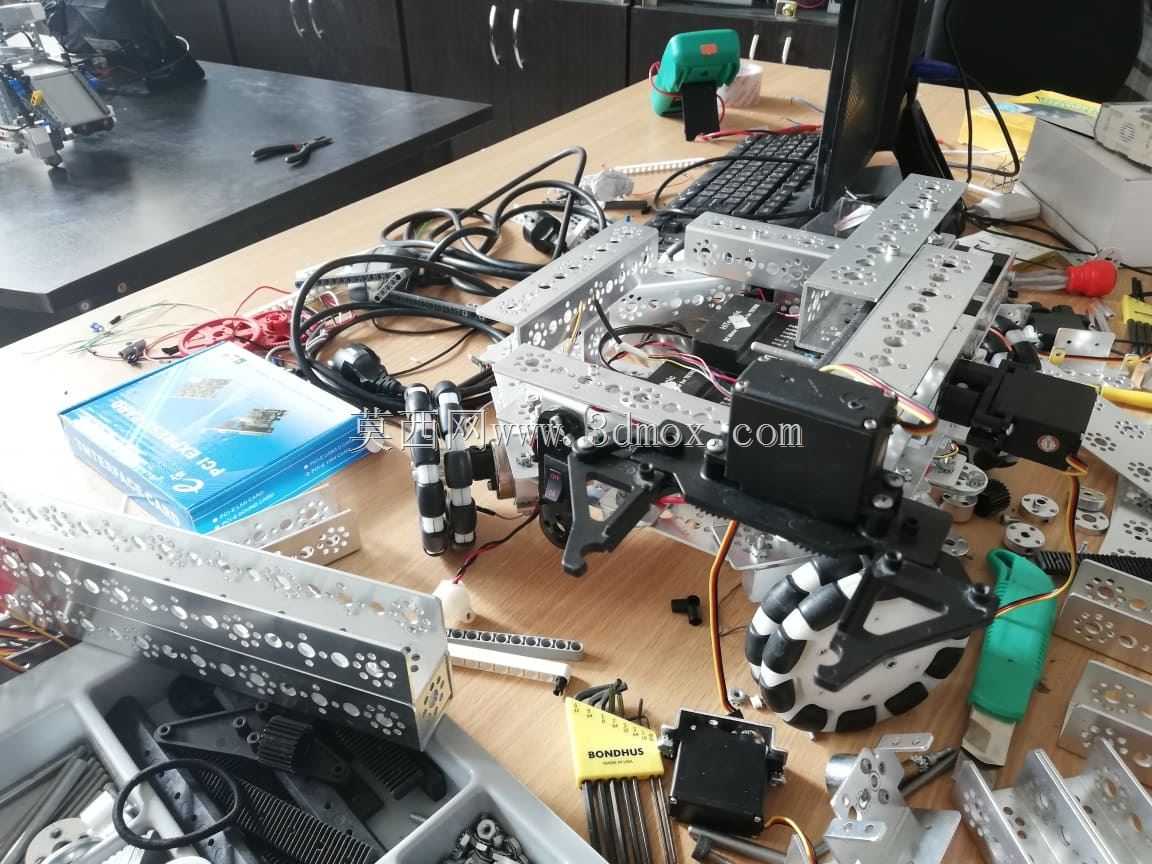

我创建这个机器人是为了参加2019年世界机器人奥林匹克运动会。这种全轮机器人是用Tetrix硬件制造的,目的是实现完整的驱动系统,它有两个手臂,可以展开并握住立方体,然后回到自己的位置