步行机器人
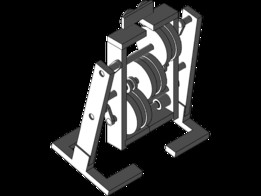
“步行机器人”是一种由两条腿和发动机缸体(滑轮、皮带、电池、电机)组成的机器人。由电池供电的电机的旋转导致两根轴所承载的滑轮的旋转,从而导致两条腿的旋转,因此机器人以直线方式前进
标签:


- 模型大小 :254.25 KB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS

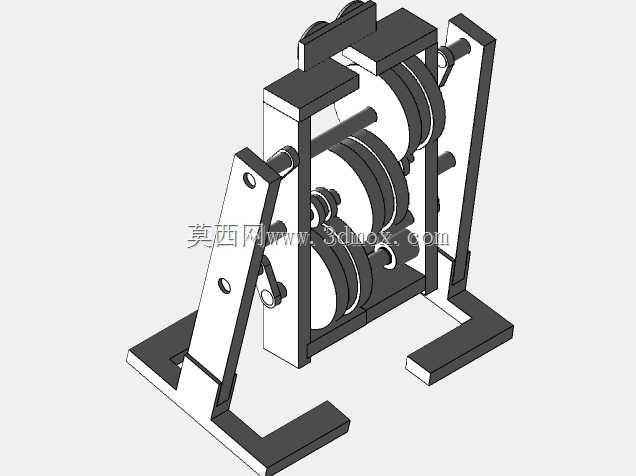
“步行机器人”是一种由两条腿和发动机缸体(滑轮、皮带、电池、电机)组成的机器人。由电池供电的电机的旋转导致两根轴所承载的滑轮的旋转,从而导致两条腿的旋转,因此机器人以直线方式前进