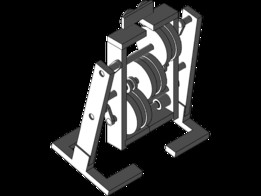
步行机器人
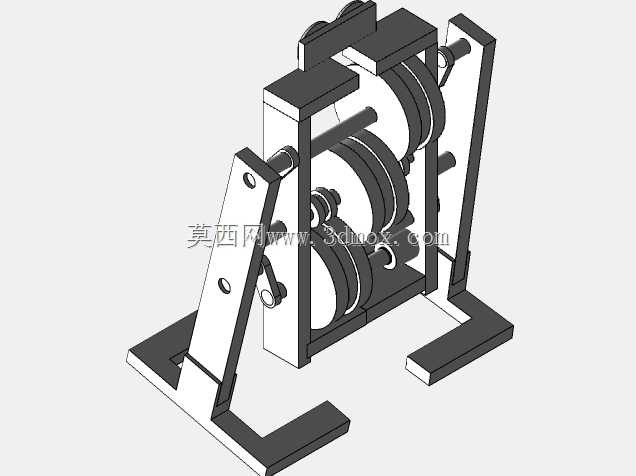




“步行机器人”是一种机器人,它构成了詹姆士和联合国集团(poulies,courroies,batterie,moteur,)的两个机器人轮换,一个机器人轮换,一个机器人轮换,另一个机器人轮换,另一个机器人轮换,另一个机器人轮换,另一个机器人轮换
标签:


- 模型大小 :1.54 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,AutoCAD,SOLIDWORKS