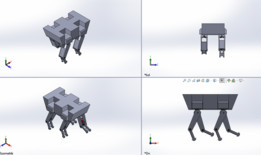
帝国6874深空机器人

这是我在solidworks中的第一个真实绘图和第一个机器人。因此,有很多绘图和计算错误。我会向你解释其中的一些:1)我没有为30*30 sigma剖面添加滑轨(我们在土耳其语中称之为“Derlin k?zak”或“sürgüray?”,我添加了链接以便你可以检查),所以从右到左有2毫米的额外距离,这对我们来说太糟糕了。我们不得不重回工业,这是浪费的时间。2) 我们选错了材料,在第一场比赛中我们的夹持器坏了。所以要小心点。3) (这是为FRC团队准备的)完成机器人后,不要放松。(对我来说)最难的部分是沮丧。我的建议是,不要在最后一刻做,完成底盘后再开始。我们在建造季节(我们已经在前几天开始)和比赛期间损失了很多小时。最后,这个机器人不是我这一季的最后一幅画,我已经改变了它。这是最后3个,所以它并不完美(最后一个机器人也不完美,有很多错误,例如滑轨),但你可以看到我是如何开始的,以及帝国2019年的机器人是如何开始的。抓球器不是我的:电梯:由Kaan Dereli(我)设计,teamGripper:由Mustafa Ali Türen设计,还有一件事:我们使用“红线+57运动”来接球和出球,“PG71”用于移动夹具(1条红线不够,如果你想制作这个模型,请将其2与变速箱一起使用。我对PG71没有任何想法,因为我们的材料很轻,我不能很好地理解,但它应该很好,你可以试试)滑轨:https://www.otomasyoncu.net/urun/kanal-8-surgu-rayi
标签:
------分隔线----------------------------
- 上一篇:基础项目2
- 下一篇:Intechne Gamex 2019机器人

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :162.76 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES