两轮平衡机器人传动系
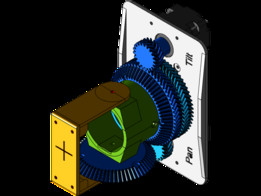
该项目是对两轮平衡机器人传动系统的重做。这种新型齿轮传动与齿轮电机相比增加了5:1的减速比,以提供更高的扭矩和更低的转速。这种安排允许向电机提供更高的PWM电压,并产生更好的稳定性控制。原始项目视频(https://youtu.be/FgtEdwIhs1Q)显示没有新传动系的机器人


- 模型大小 :16.39 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,Other

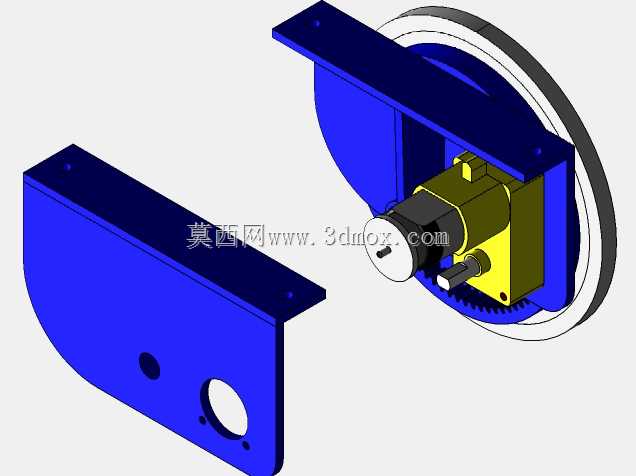
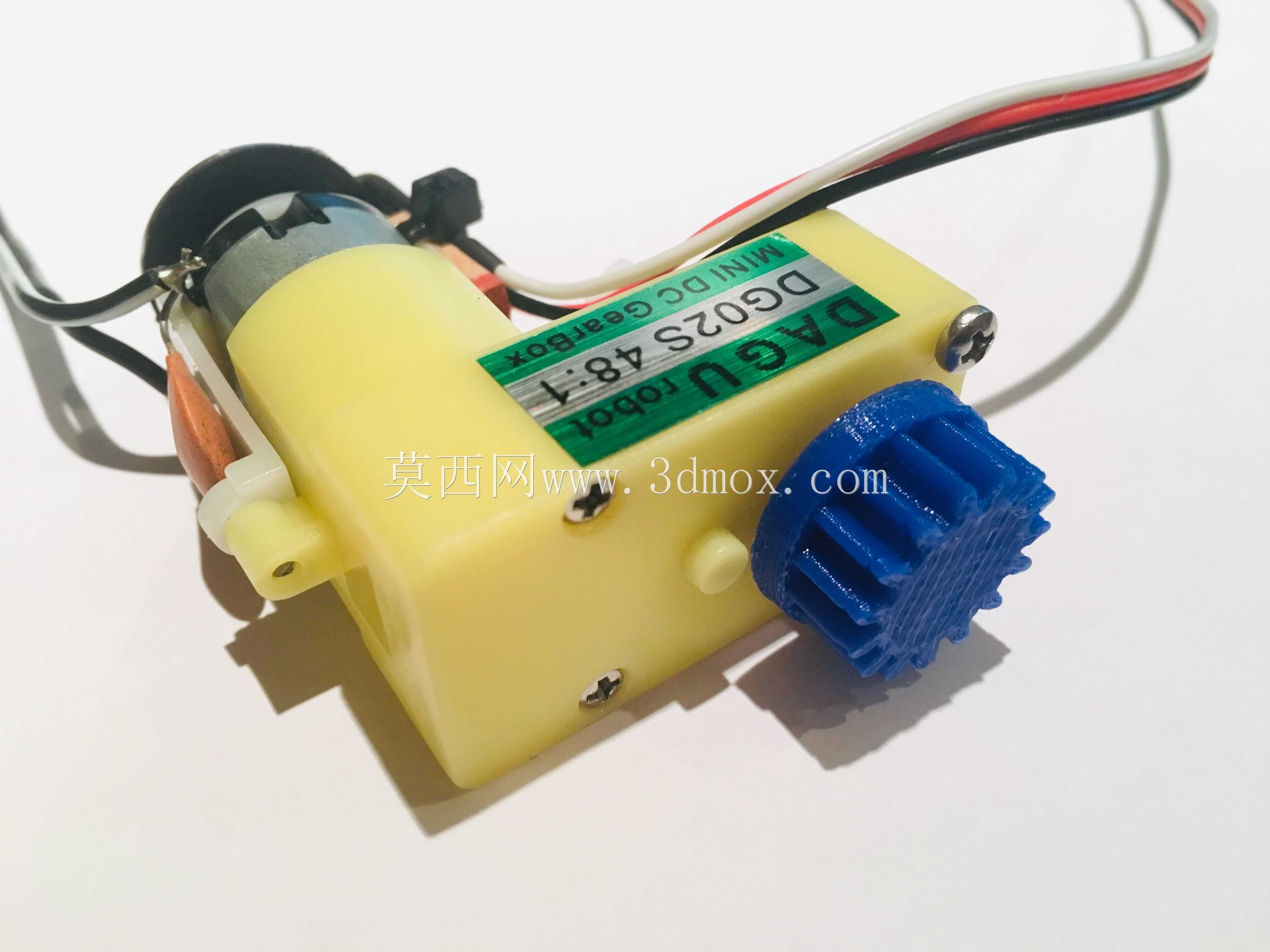
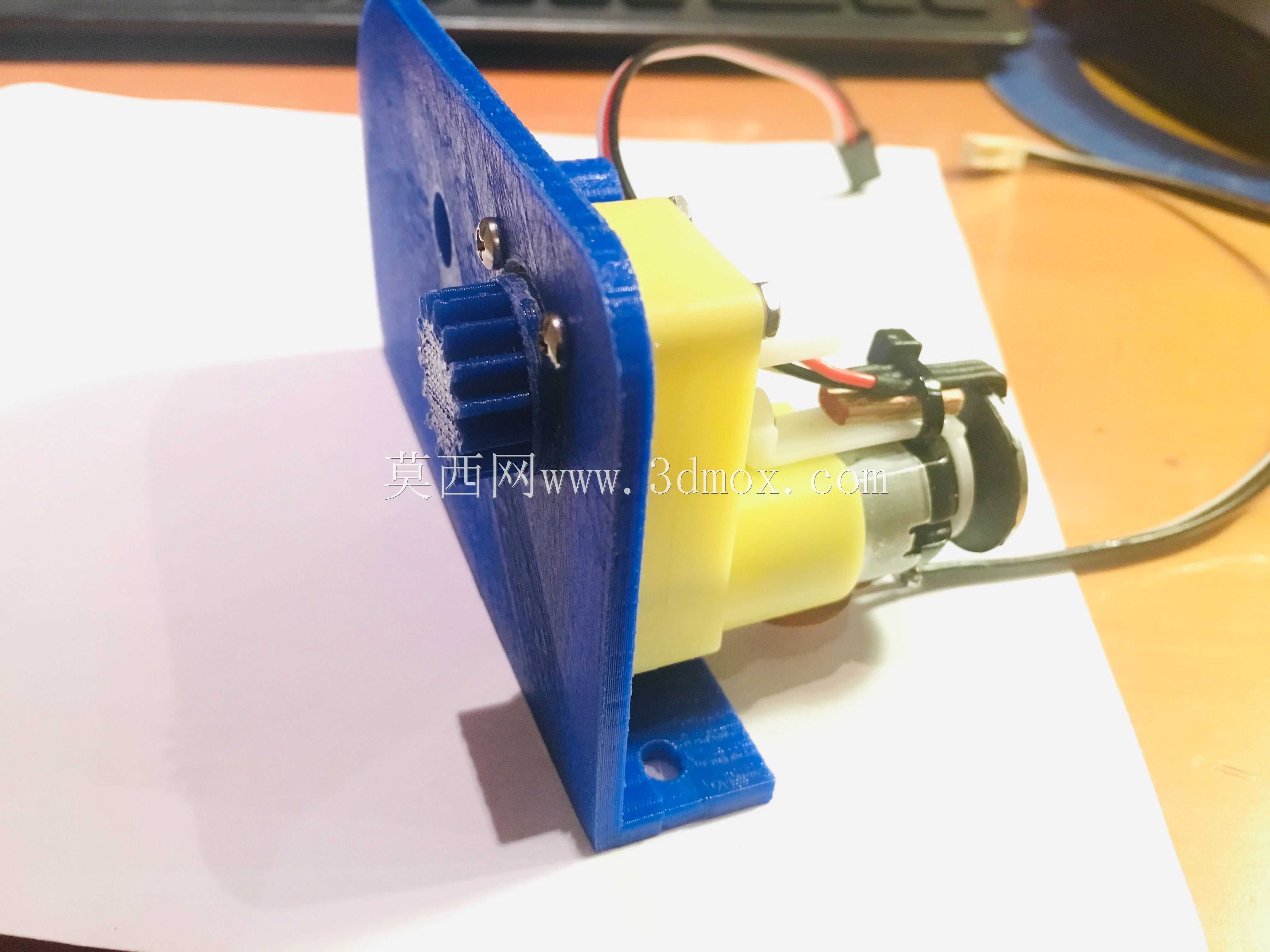



该项目是对两轮平衡机器人传动系统的重做。这种新型齿轮传动与齿轮电机相比增加了5:1的减速比,以提供更高的扭矩和更低的转速。这种安排允许向电机提供更高的PWM电压,并产生更好的稳定性控制。原始项目视频(https://youtu.be/FgtEdwIhs1Q)显示没有新传动系的机器人