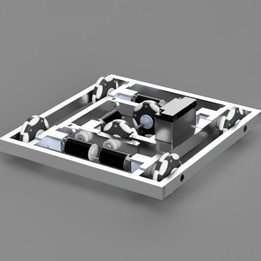
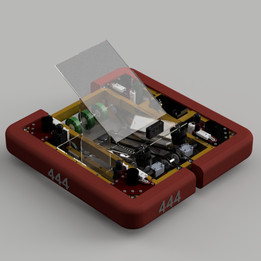
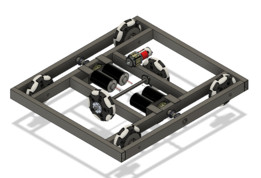
卡达顿转弯车道Tri-bot

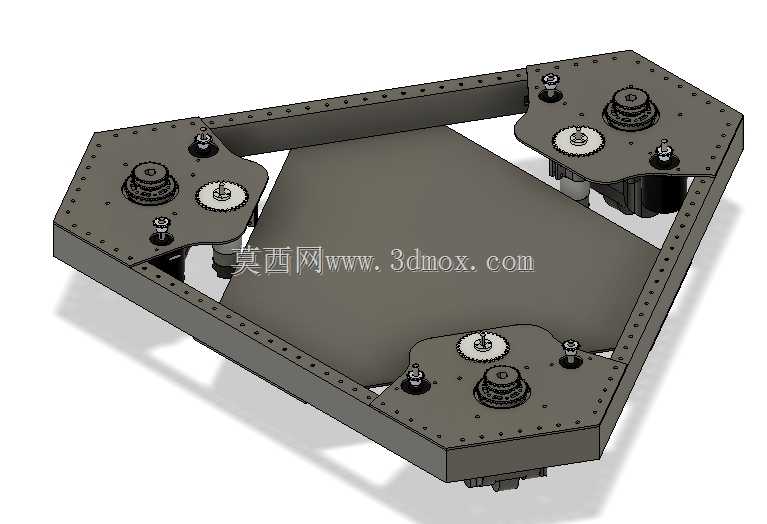
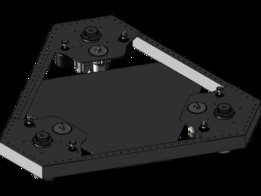
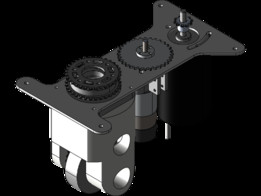
这是由FRC团队6635设计的转向驱动三机器人底盘。其设计为每个车轮使用两个Rev NEO电机,因此该设计具有相对较低的每个车轮传动比。该机器人针对高速行驶进行了优化,这意味着它不应该卷入推搡战。这种转向驱动装置是为参加F4卡达通比赛而开发的,在现实生活中生产起来并不太可行
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :8.44 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering