由Arduino控制的Flexy robot 3D打印



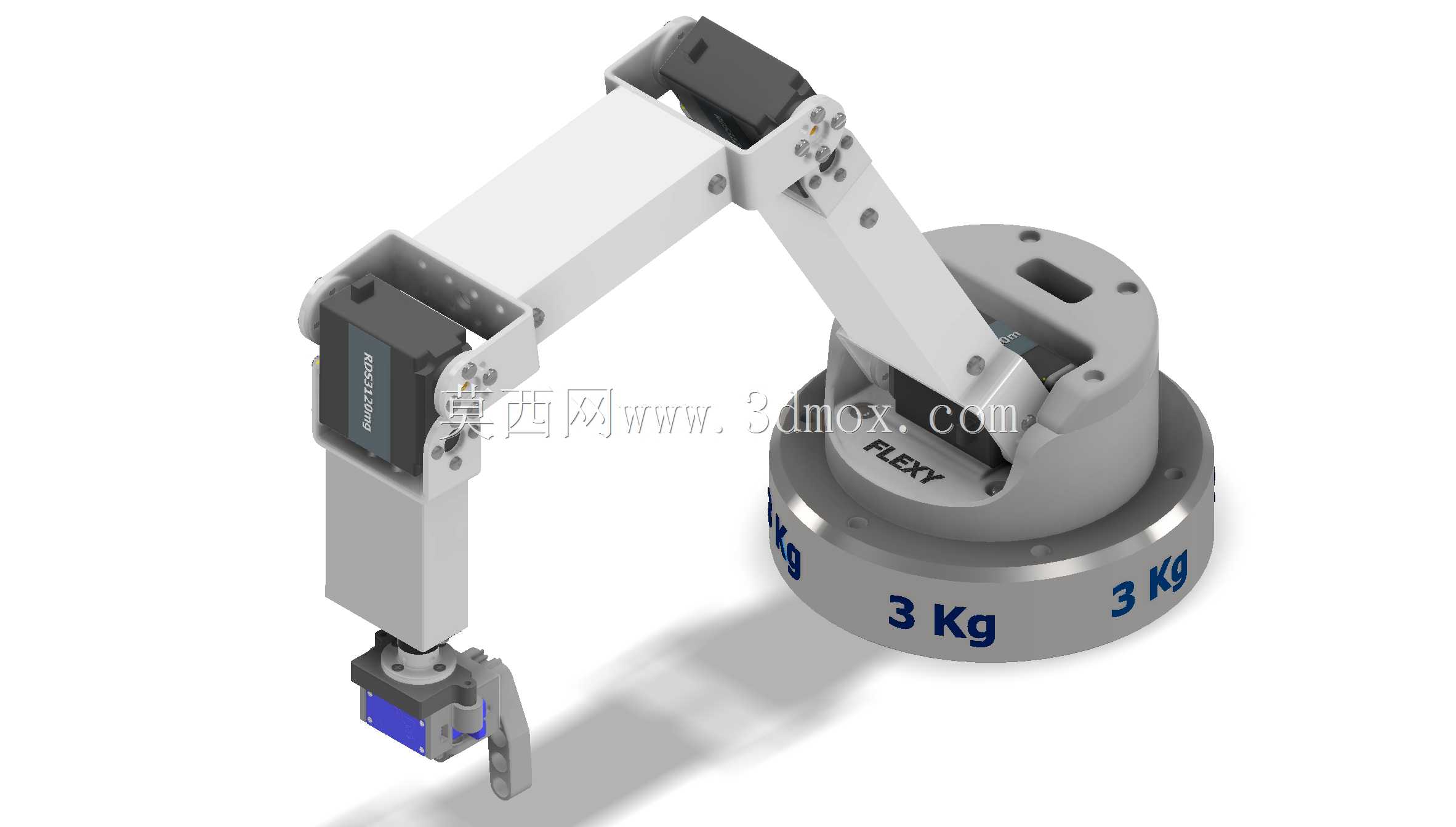


具有3个RDS3220MG伺服的柔性拟人机器人。适合高中学习工业自动化的低成本机器人。易于组装机器人,只需少量零件即可进行3D打印。我使用40x20x1.2mm铝矩形管作为链接。可以通过要进行3D打印的内部适配器扩展链接。伺服电机的同步运动目标是使拟人机器人连杆的运动尽可能流畅,以最小化连杆的振动。Arduino代码和windows应用程序在此可用(“flexy”密码):http://energiazero.org/cartelle.asp?dir=inventor_animazioni/flexySome实验:https://youtu.be/1-zcwsjXqsg
标签:
------分隔线----------------------------
- 上一篇:气动工业自动化练习
- 下一篇:使用Inventor的摆线轮廓三维模型

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :11.71 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering