一个适用于所有对象的可扩展对象(曲线)





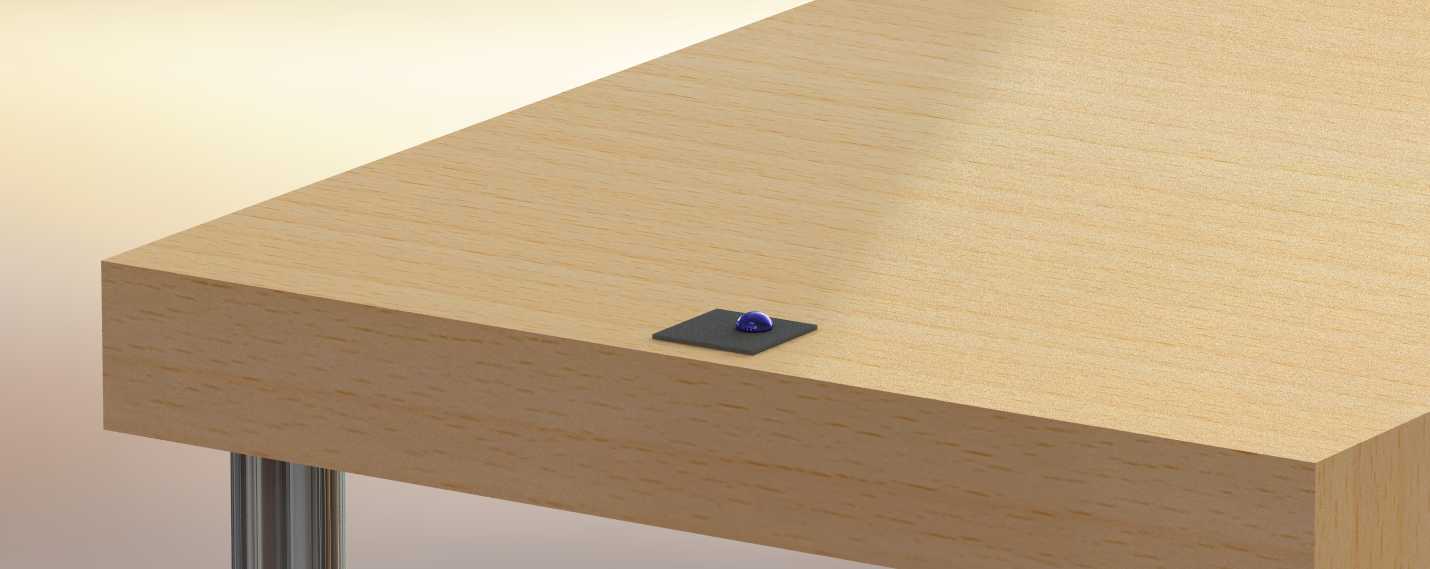
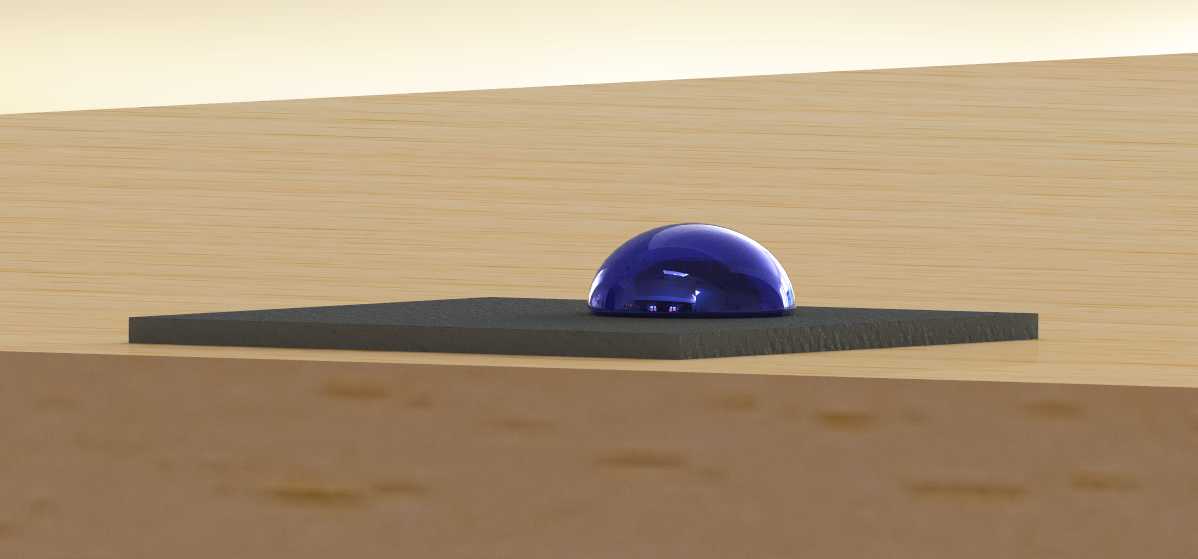

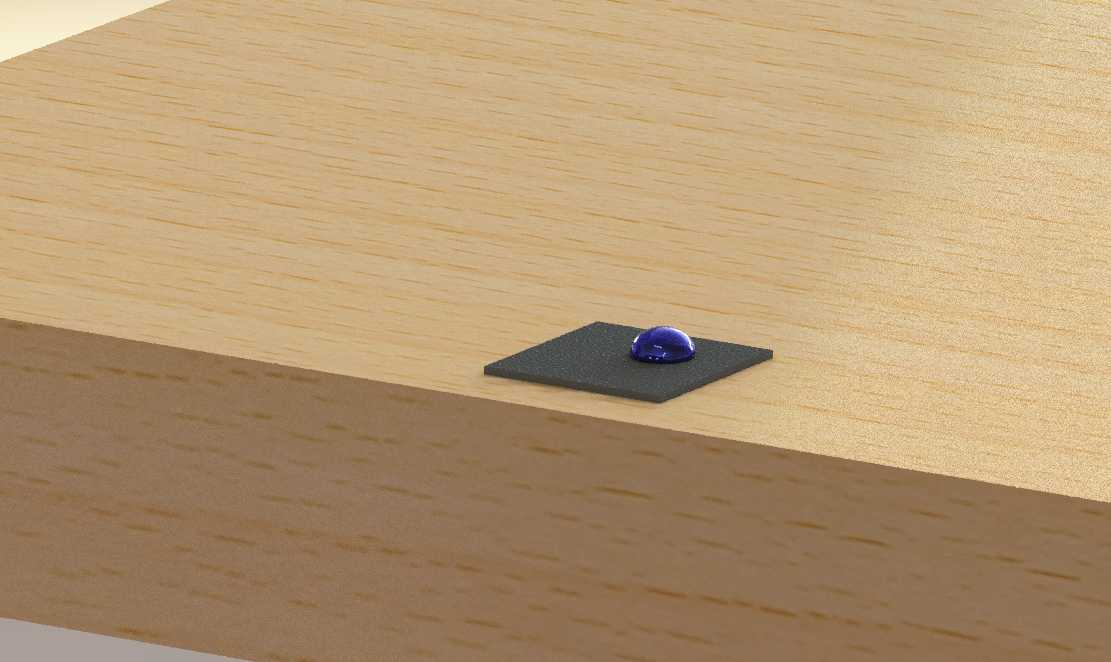
根据我使用机器人夹持器的经验,我认为基于具有可变内部的曲线形状是正确的方法。可以缩放曲线的大小,使其接近正在处理的对象的大小。您可以更改壳的厚度或孔隙度。您可以更改表面材质,以表示容易划伤或容易损坏机器人抓取器的物体。您甚至可以更改液体的密度或数量,以测试行驶过程中的瞬间。我认为有一点很重要,那就是平底面最能代表物体所附着物体的可能握力。我知道这种设计代表了镜头拾取的许多元素,但我确实认为这是一个模块测试台,即使是人手也很难搬运。当然,您可以制作一个具有多种常见特征的物体,每种类型的夹持器都可以很好地处理这些特征,或者您可以使用任何类型的夹持器制作最难拾取的物体,并对其进行调节,以适合您将拾取的材料/情况的类型。为了进一步说明我的示例,很容易想象这个对象将如何表示鸡蛋,但您可能会问它如何表示钳子?要做到这一点,您需要使曲面具有一个重心,该重心位于钳子的位置,同时提供手柄在与被抓取的床身接触时可能具有的夹持力。对夹持器施加的作用力不会引起太大的关注,因此在这种情况下,曲线可能是金属的。由于内部可变,因此可以进行定制,这是最重要的一点,但曲线可以颠倒放置以实现平坦的非稳定曲面也有帮助。您可以通过3D打印、加工和注塑制作测试对象(曲线)。根据要从中生成曲线的材质,您需要各种方法
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :6.64 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,STL,STEP / IGES