爆炸机器人
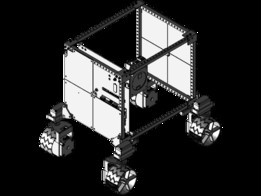
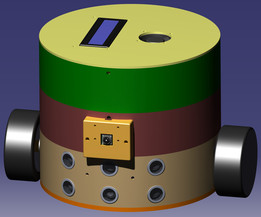
该机器人致力于探索其环境。第一个版本是使用差速器来平衡自身,但另一个版本只是将腿固定在结构上。该结构的目标是为未来的改进提供一定的自由度。不幸的是,这个项目没有完成。除了电子产品外,所有部件都是3d打印的,带有Ender 3。有关更多详细信息,请随时与我联系


- 模型大小 :323.78 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other

该机器人致力于探索其环境。第一个版本是使用差速器来平衡自身,但另一个版本只是将腿固定在结构上。该结构的目标是为未来的改进提供一定的自由度。不幸的是,这个项目没有完成。除了电子产品外,所有部件都是3d打印的,带有Ender 3。有关更多详细信息,请随时与我联系