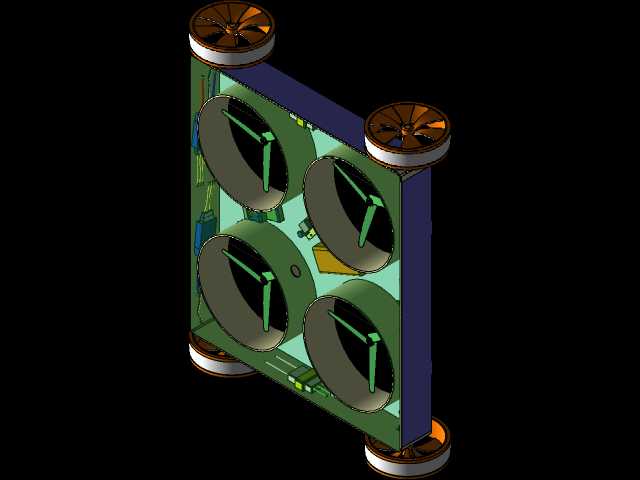
爬墙机器人
大多数爬墙机器人都使用吸盘,吸盘用于产生真空压力,使机器人能够粘附在垂直表面或墙壁上。吸盘、直流齿轮电机、轮子、低重量塑料底盘和接近传感器等传感器是爬壁机器人所需的大部分组件
标签:


- 模型大小 :4.28 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS

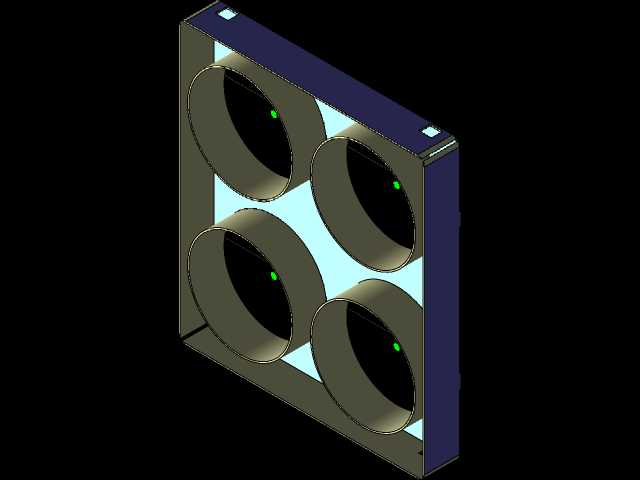
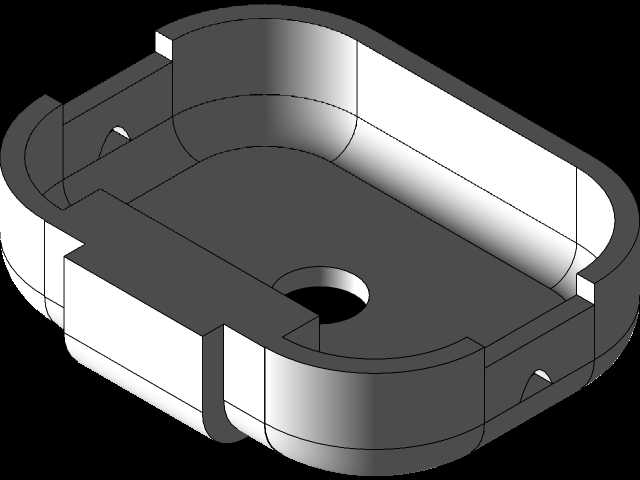
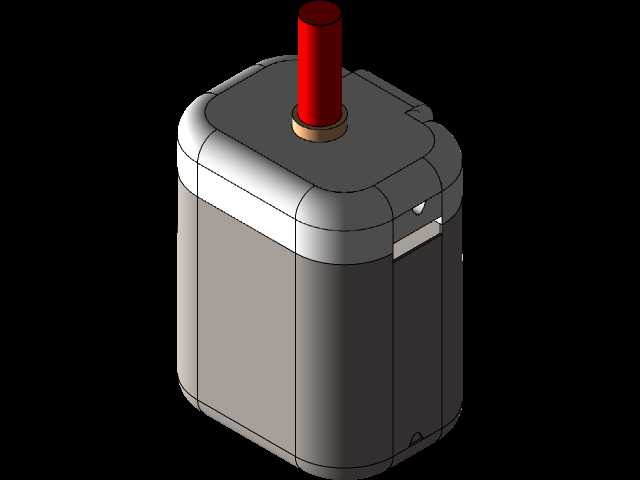
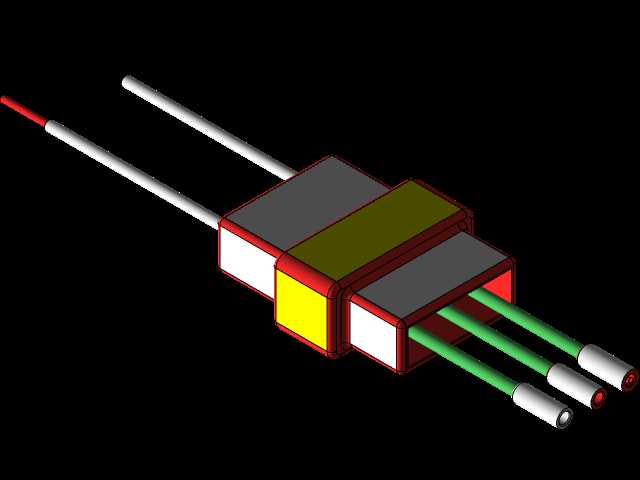

大多数爬墙机器人都使用吸盘,吸盘用于产生真空压力,使机器人能够粘附在垂直表面或墙壁上。吸盘、直流齿轮电机、轮子、低重量塑料底盘和接近传感器等传感器是爬壁机器人所需的大部分组件