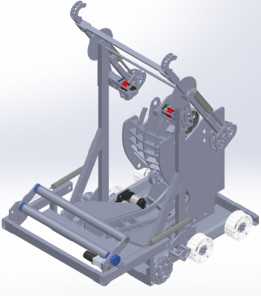
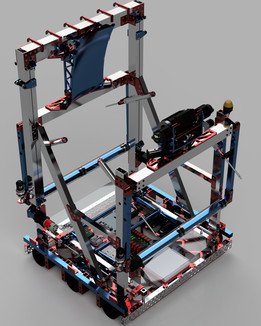
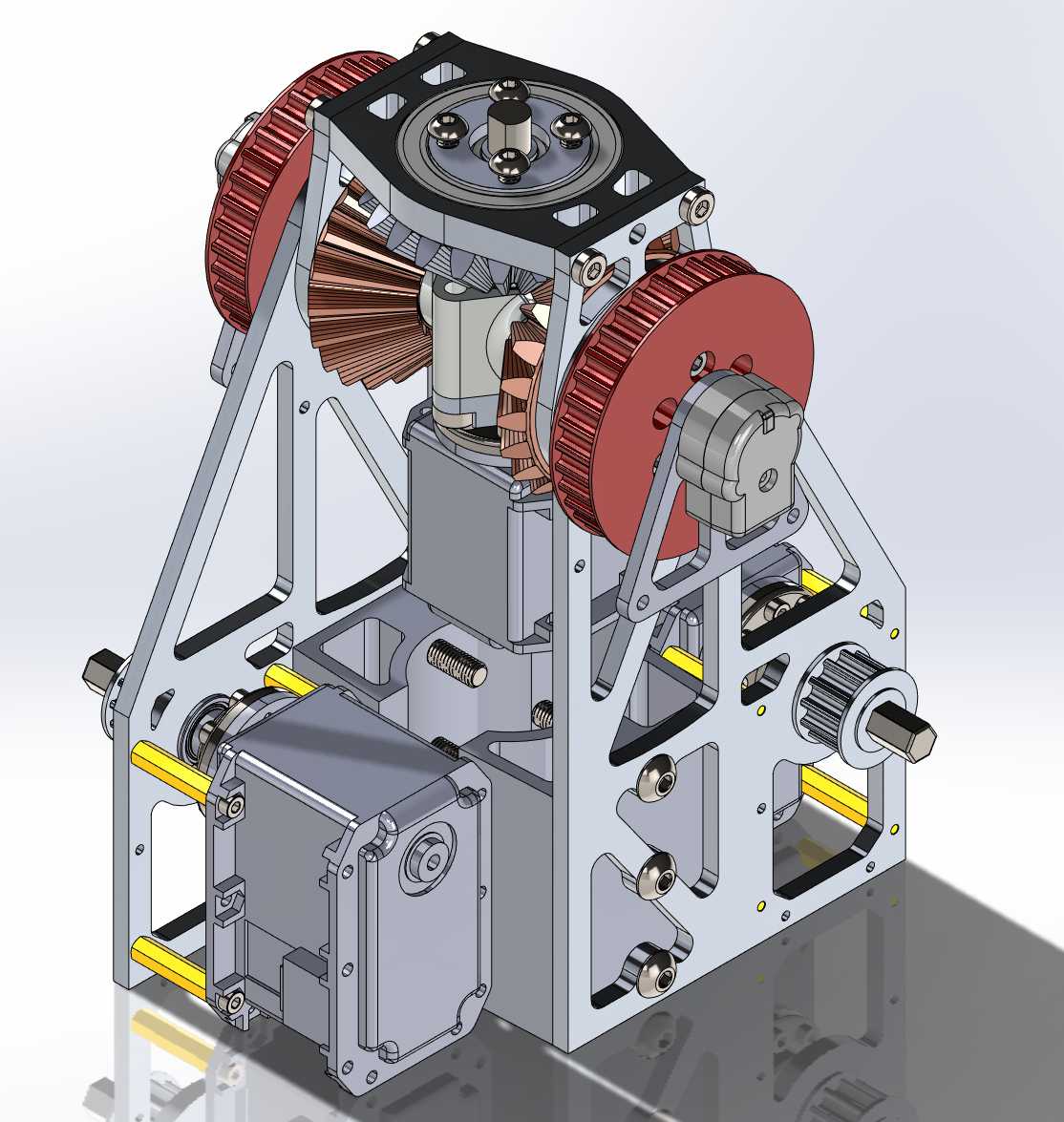
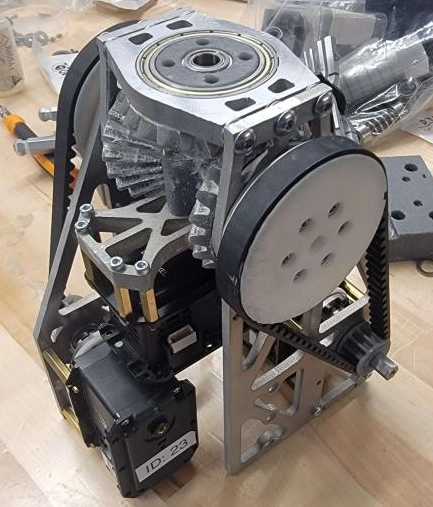
皮带传动差速器腕
新的轴5和6,以及我们在大学漫游者竞赛中使用的夹具驱动电机设置,以提供完整的6DOF控制主要由喷水板零件制成,只需最少的额外加工和3D打印的齿轮和滑轮。这里显示的是一个迭代:6 DOF机器人臂,它不是实际建造的,使用皮带减速来提供额外的扭矩


- 模型大小 :140.3 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Snagit,Rendering


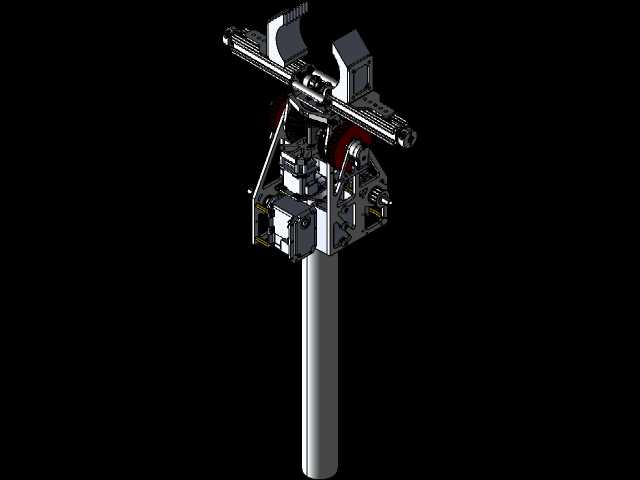
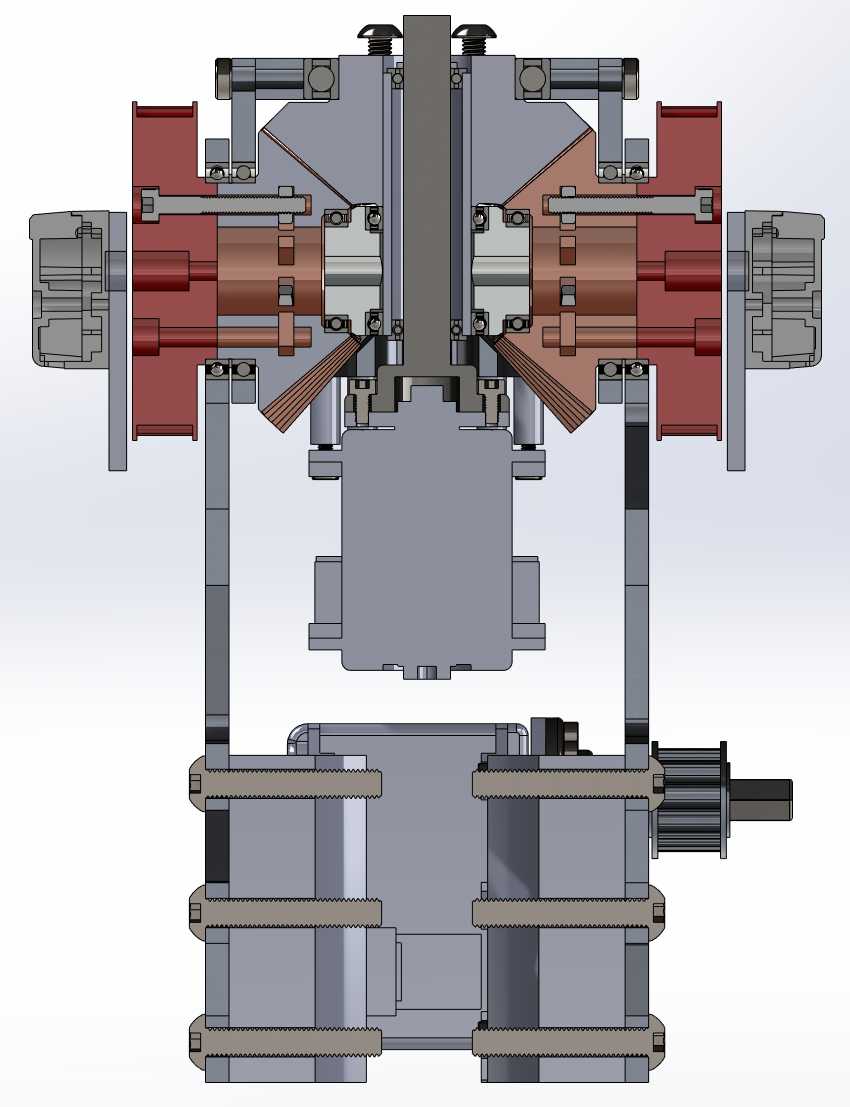
新的轴5和6,以及我们在大学漫游者竞赛中使用的夹具驱动电机设置,以提供完整的6DOF控制主要由喷水板零件制成,只需最少的额外加工和3D打印的齿轮和滑轮。这里显示的是一个迭代:6 DOF机器人臂,它不是实际建造的,使用皮带减速来提供额外的扭矩