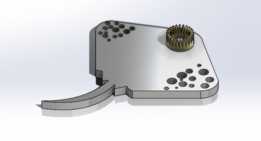
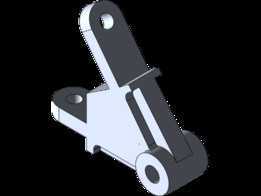
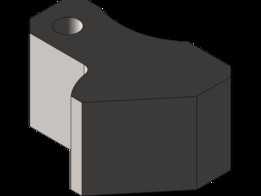
径向回转块

首先,我在右下方创建了两个圆圈,分别为19毫米和45毫米。然后我在其中创建了中心线。接下来,我画了两条对角线中心线,它们是从小圆的圆心开始的。然后,我做了一个测量120的中心线,在该线的1/2标记后做了一条线,然后向上,再往下做一条中心线,并巧妙地确定了它的尺寸,以确保它仍然相距31.75,并做了所有其他必要的线。然后,我确保连接件长16.50mm,并将其他线条连接到顶部,查看蓝图,然后走到最左侧,确保水平线为35mm,连接到它的对角线为36.86mm。然后,我在下半部分和上半部分做了同样的事情。接下来,我在两个圆附近做了两个东西,先做了一个小谎言,然后做了一圈半径为7.50的圆,并朝着这两个圆做了一条连接线,然后我做了一道弧线将其连接到圆上。接下来,我把除了圆和连接它们的东西之外的所有东西都挤压到机器人侧面20毫米处。接下来,我把其他的东西都挤出,大圆到26.35mm,把小圆挤出,把其他的都挤出到18mm。最后,我把我的材料换成了1060合金,并检查了我的质量
标签:


- 模型大小 :167.78 KB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS