德尔塔机器人
三角机器人是一种并联机器人,由三个连接到底座万向节的臂组成。关键的设计特点是在臂中使用平行四边形,与Stewart平台不同,Stewart平台可以改变末端执行器的方向
标签:


- 模型大小 :2.49 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS



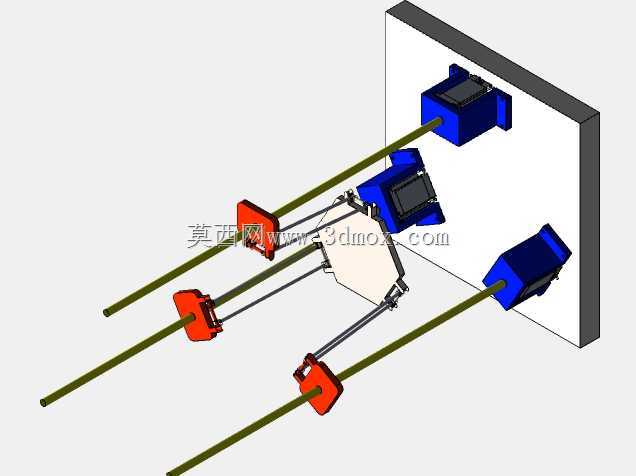
三角机器人是一种并联机器人,由三个连接到底座万向节的臂组成。关键的设计特点是在臂中使用平行四边形,与Stewart平台不同,Stewart平台可以改变末端执行器的方向