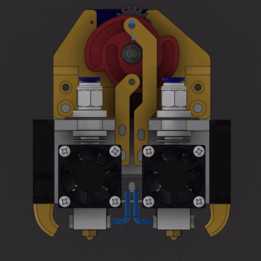
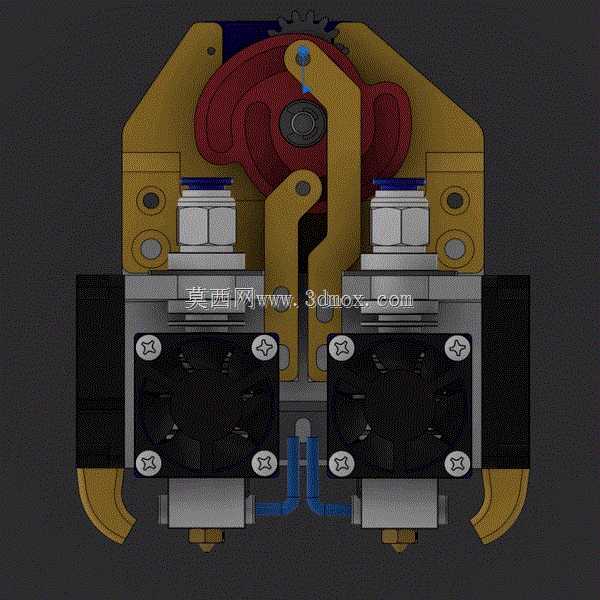
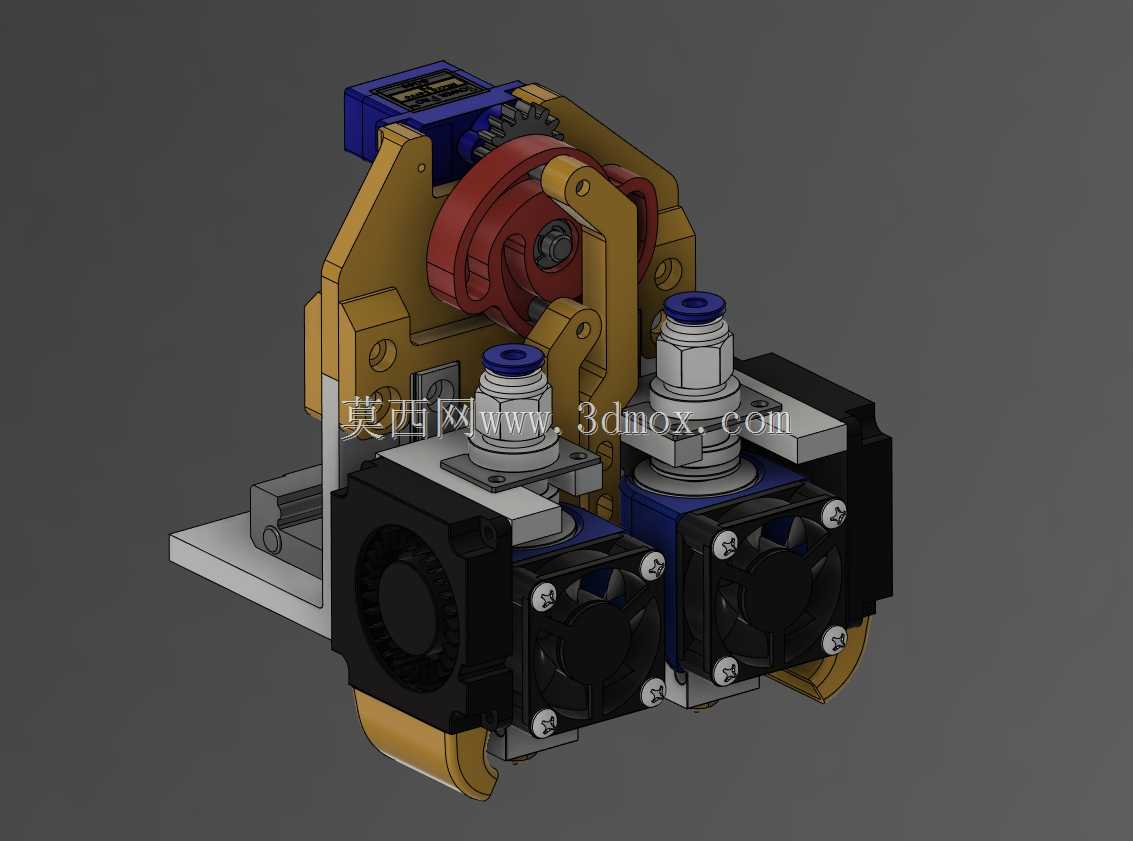
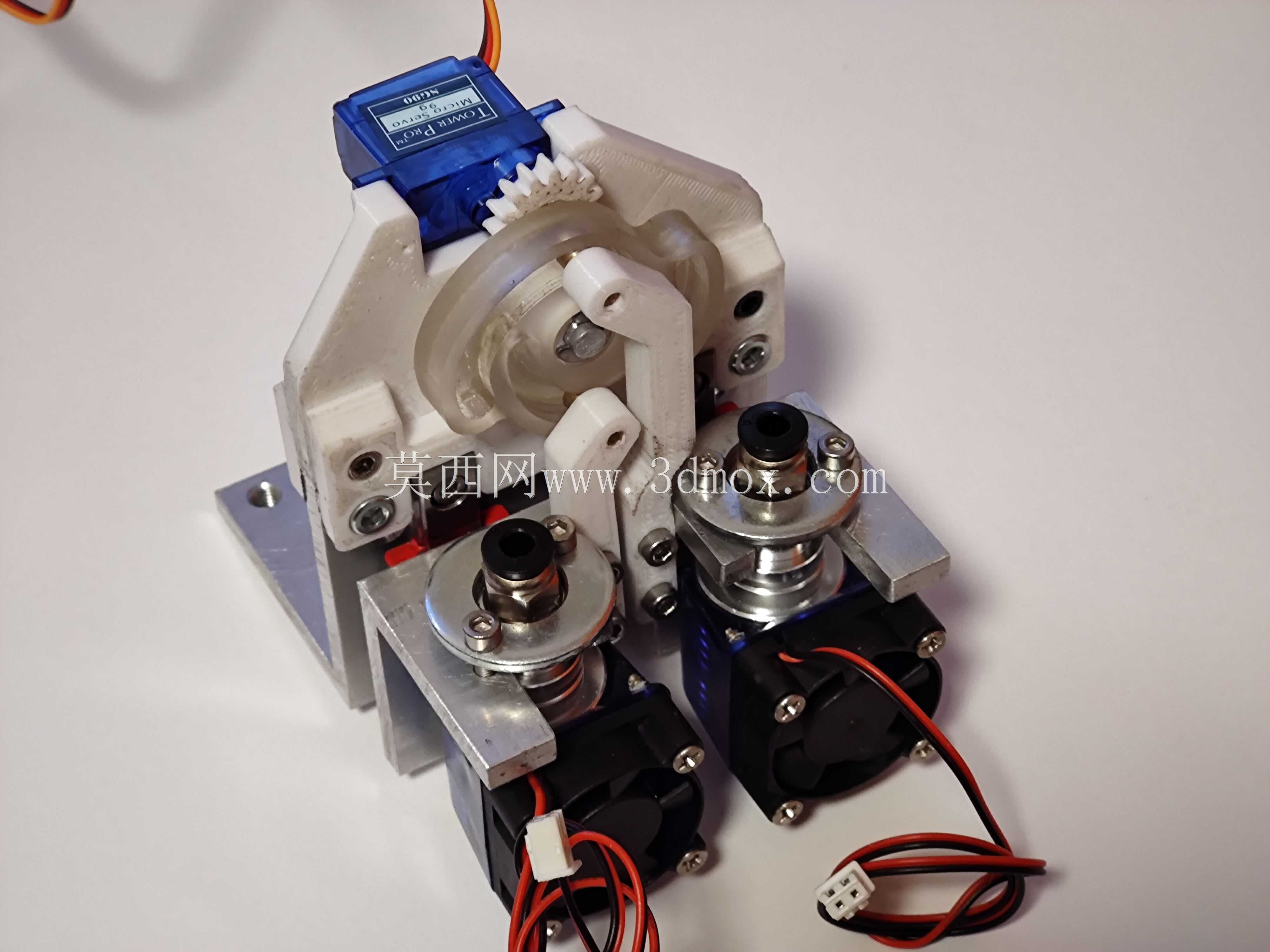
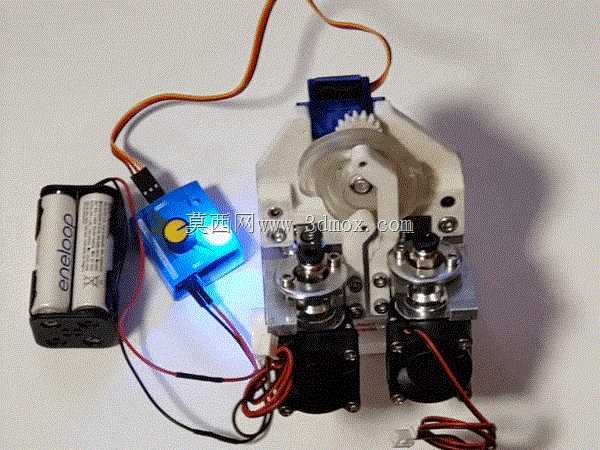
双交换热端概念
伺服驱动的杆和开关机构,由凸轮盘操作。-命令角度180°-Z位移8mm-最终位置的角度公差补偿+/-10°旋转构建在适合我的打印机的L形支架上(请参阅我的型号)。它很紧凑,定位很精确,虽然有点重――我使用了只用于原型设计的组件。我现在正在研究固件,如果我成功地集成了它,我会改进最终设计


- 模型大小 :25.29 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering

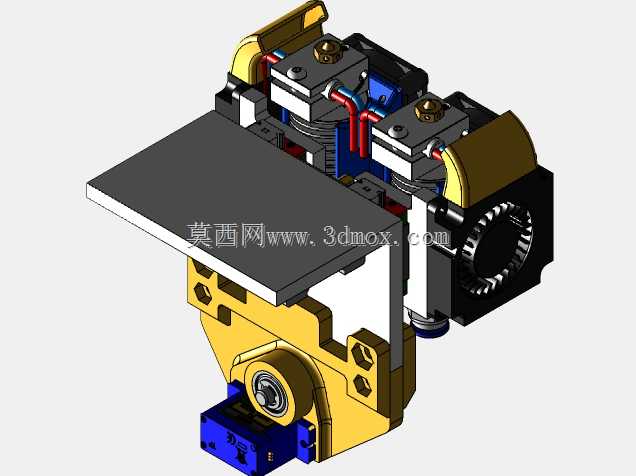
伺服驱动的杆和开关机构,由凸轮盘操作。-命令角度180°-Z位移8mm-最终位置的角度公差补偿+/-10°旋转构建在适合我的打印机的L形支架上(请参阅我的型号)。它很紧凑,定位很精确,虽然有点重――我使用了只用于原型设计的组件。我现在正在研究固件,如果我成功地集成了它,我会改进最终设计