四边形
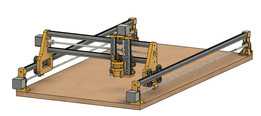
使用金属齿轮(13g)伺服装置的四足式。我只是走路不太舒服。我使用的伺服系统不符合规格,开始失效。身体可能有点太宽了,使平衡和行走成为一场噩梦。测试是用与机器人分离的arduino mega进行的


- 模型大小 :7.1 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,Rendering













使用金属齿轮(13g)伺服装置的四足式。我只是走路不太舒服。我使用的伺服系统不符合规格,开始失效。身体可能有点太宽了,使平衡和行走成为一场噩梦。测试是用与机器人分离的arduino mega进行的