

SUP张开双臂

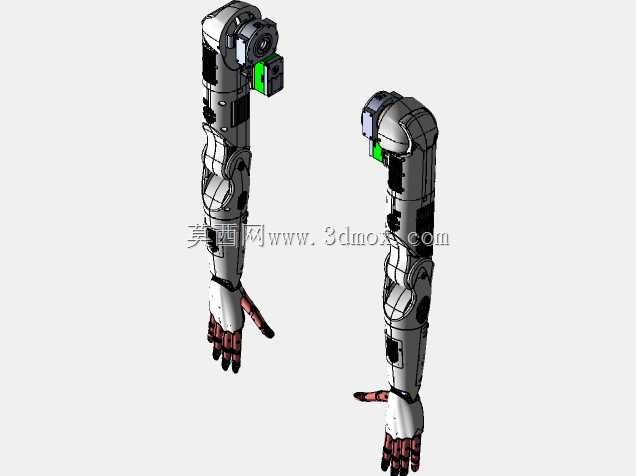





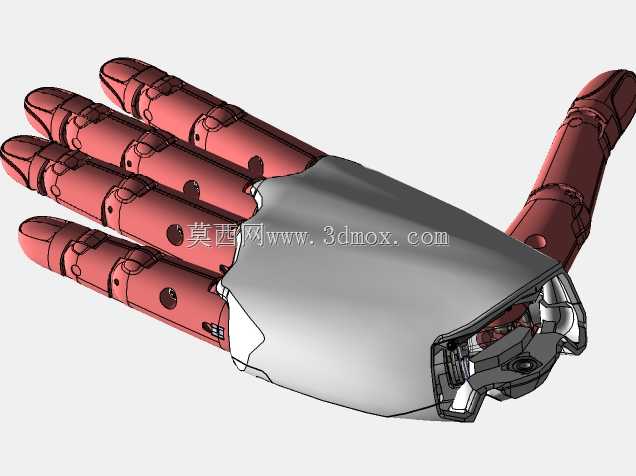
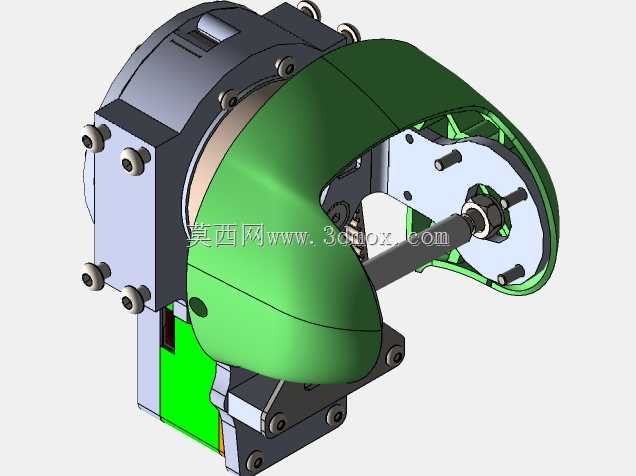
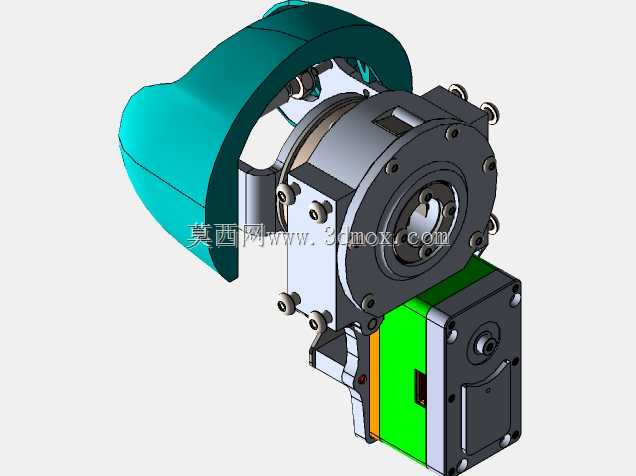
SUP Open Arms有28个DoF,硬件设计用于模拟人手和手臂的动作、外观和功能。每个手臂包括用于肩关节(俯仰和滚转)的2DoF、用于肩偏转的1DoF、肘部(俯仰)的1Dof、前臂(偏航)的1Do和手腕(俯仰、滚转)的2DoF。每只手包括用于拇指的2个DoF,以及用于由单个致动器控制的其他手指中的每一个的4个DoF。由于尺寸限制,每只手都使用Hanson AI版本的Feetech伺服系统和PololuMaestro控制器24ch。为了获得反馈,每个手指和手腕上都有压力传感器垫和电位计。注:将定期添加更多关于其组装方式的说明


- 模型大小 :924.65 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Other,Rendering

















