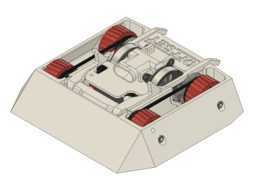
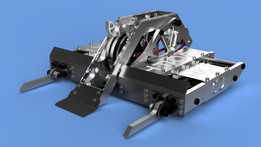
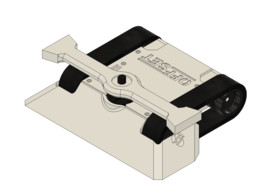
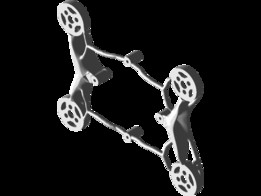
SS8.1差速扫描模块

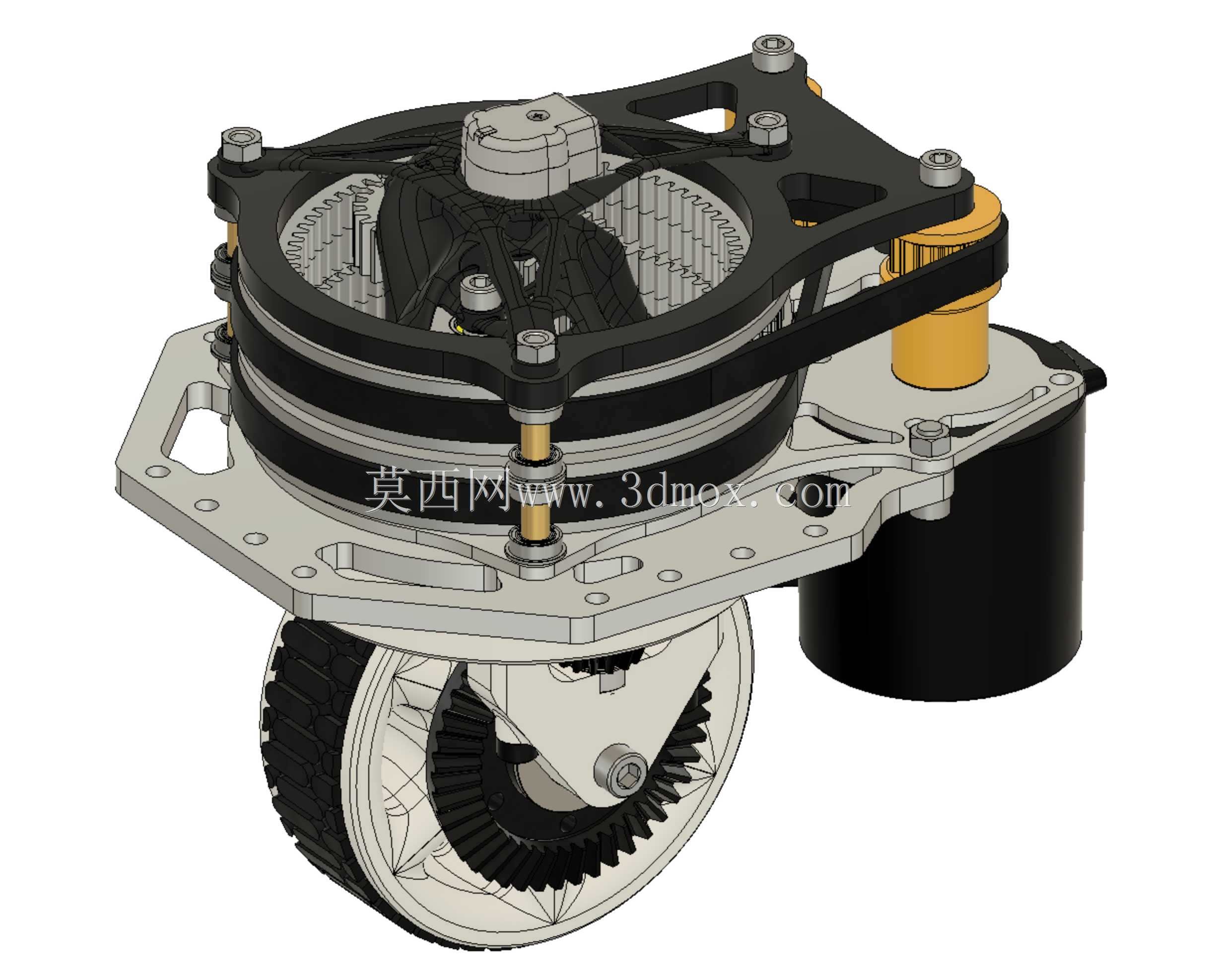

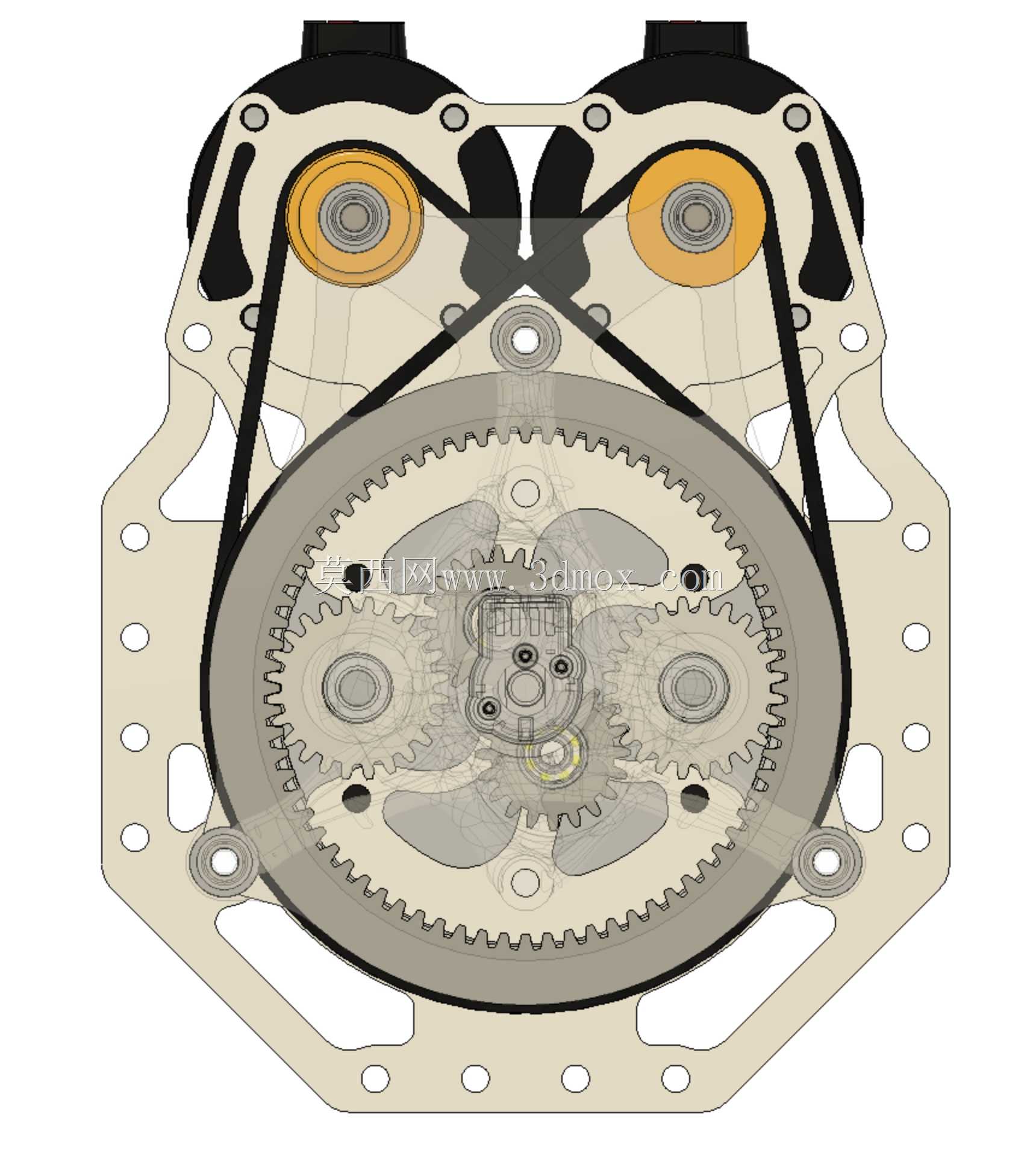
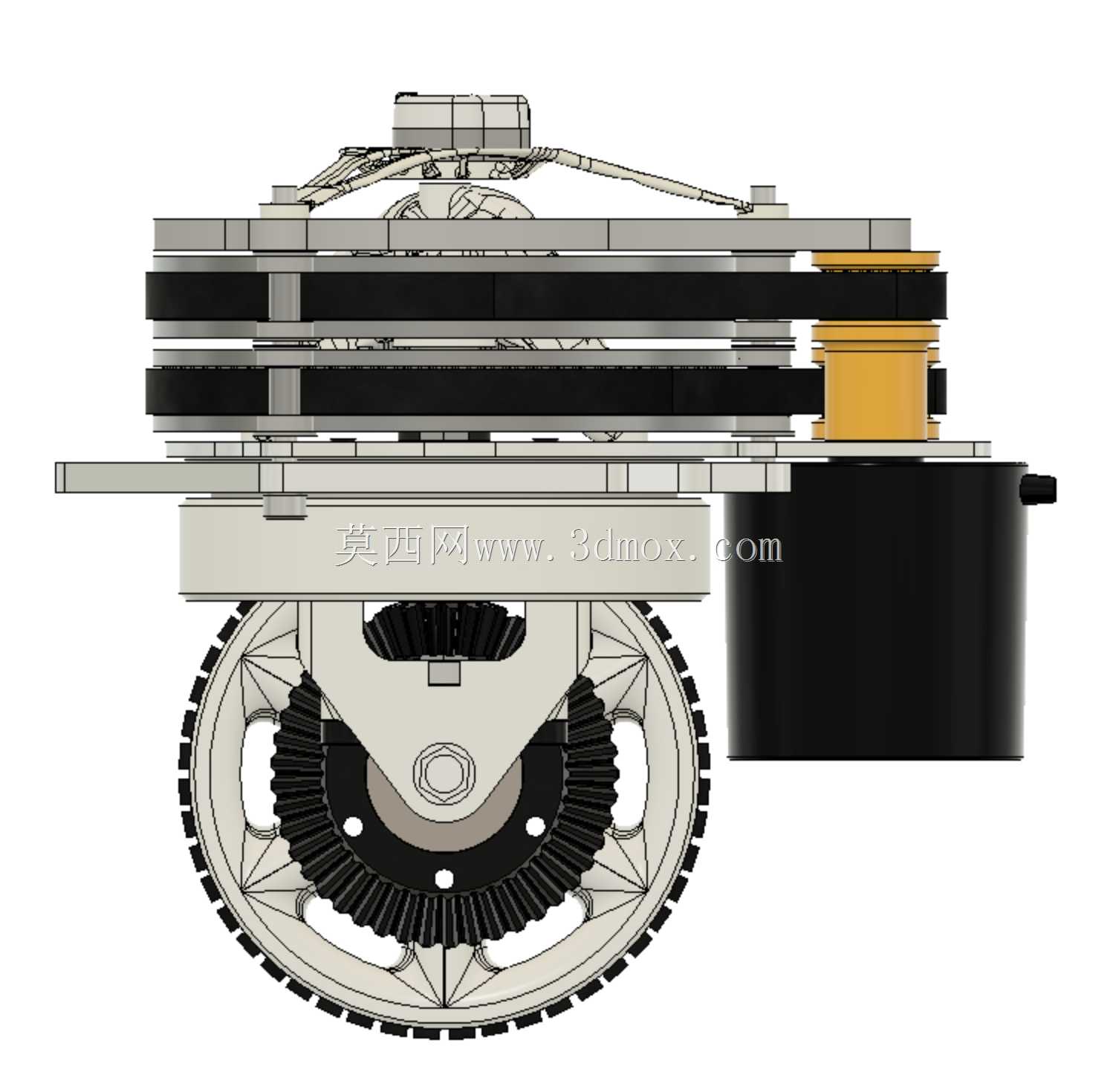
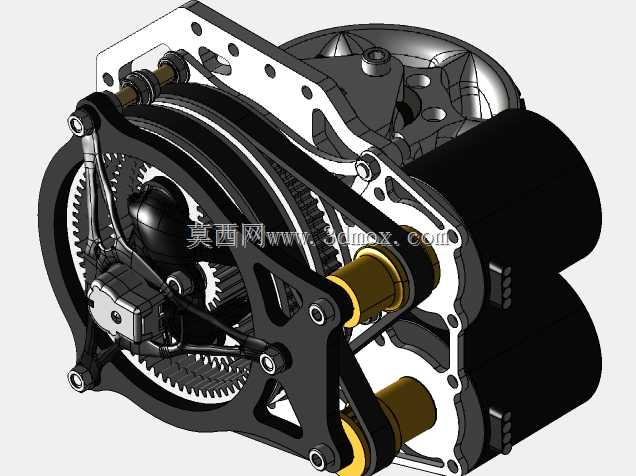
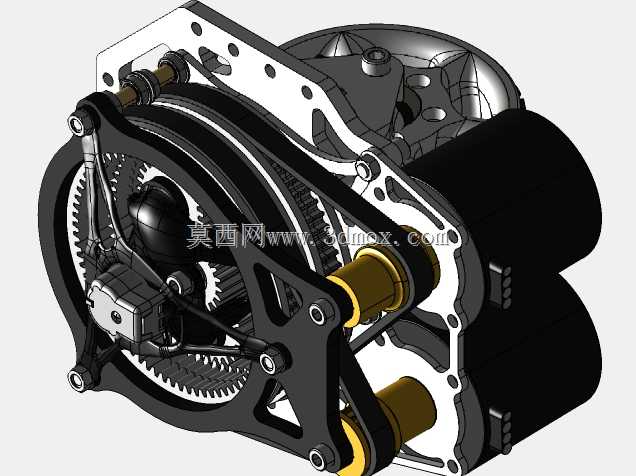
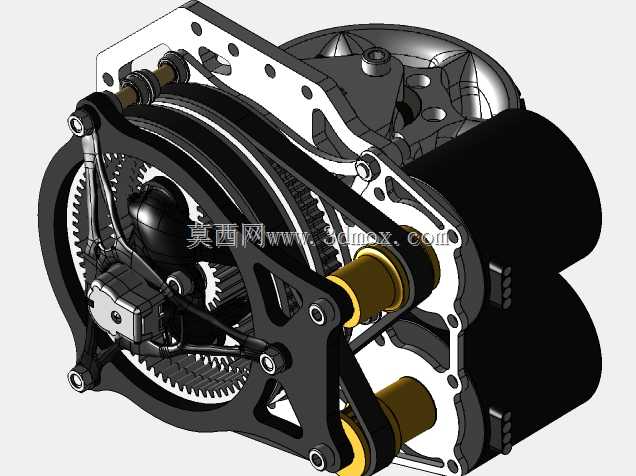
正在开发中,为FIRST机器人竞赛机器人设计的差速转向模块。有了差速器,两个驱动电机既可以转动车轮,也可以转动模块。当两个微分环的相对旋转相加时,非零结果使模块旋转。通过对每个圆环的绝对值求和,得出转轮的旋转量
------分隔线----------------------------
- 上一篇:MKS TS35-R v2.0
- 下一篇:HW-803 5V直流继电器模块

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :147.66 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :KeyCreator,STEP / IGES,Rendering