

两足机器人最终详细设计

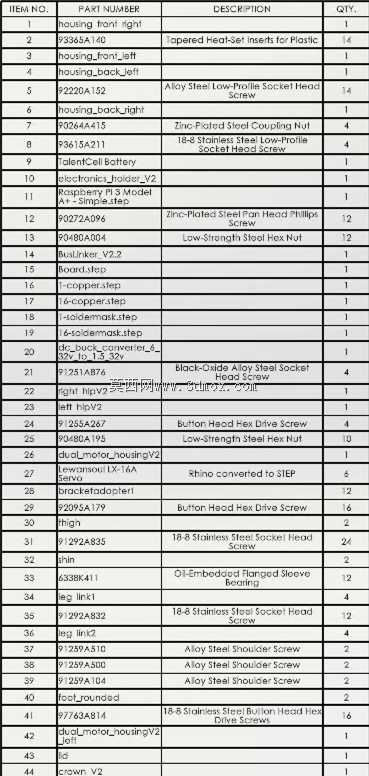
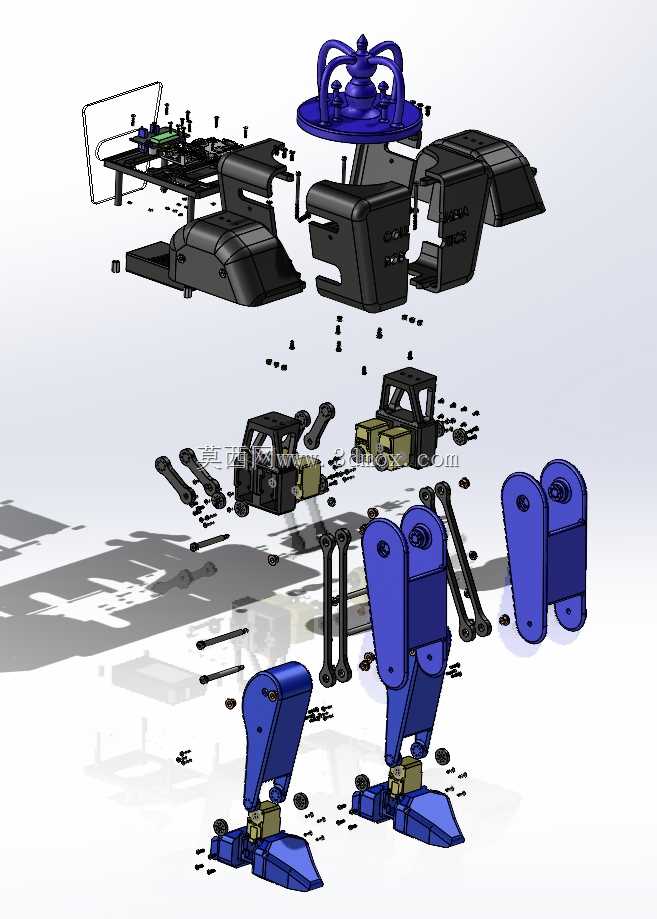
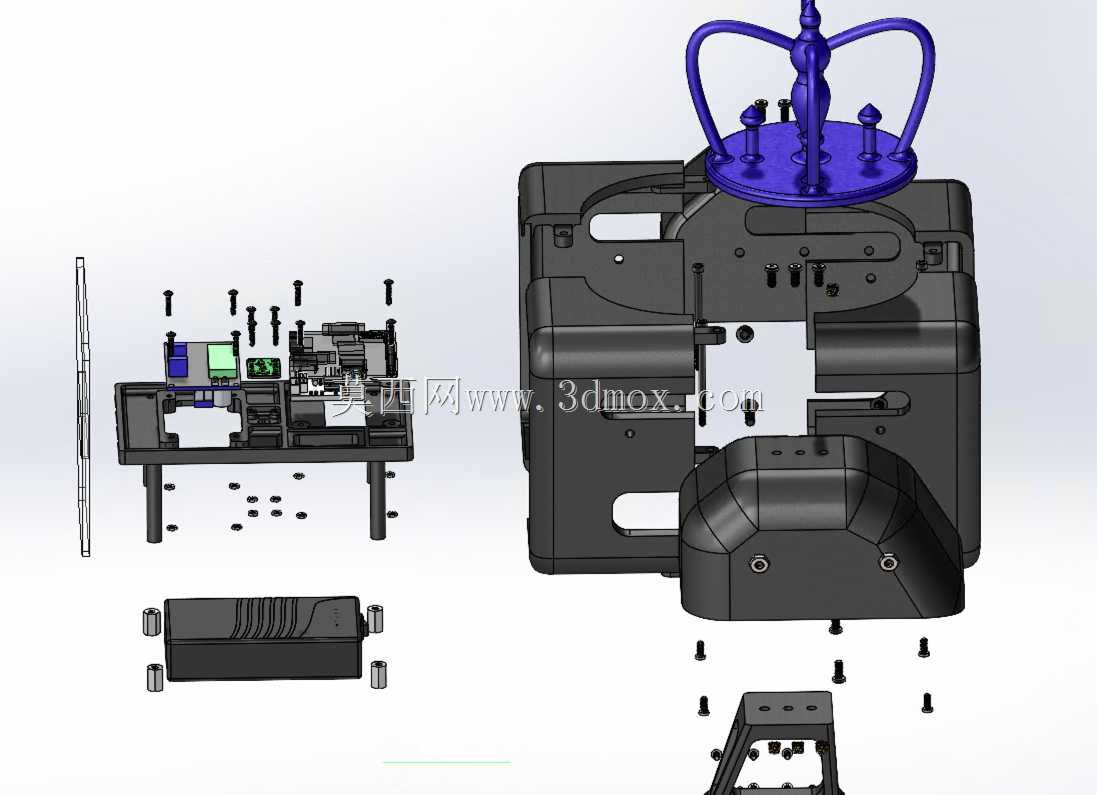
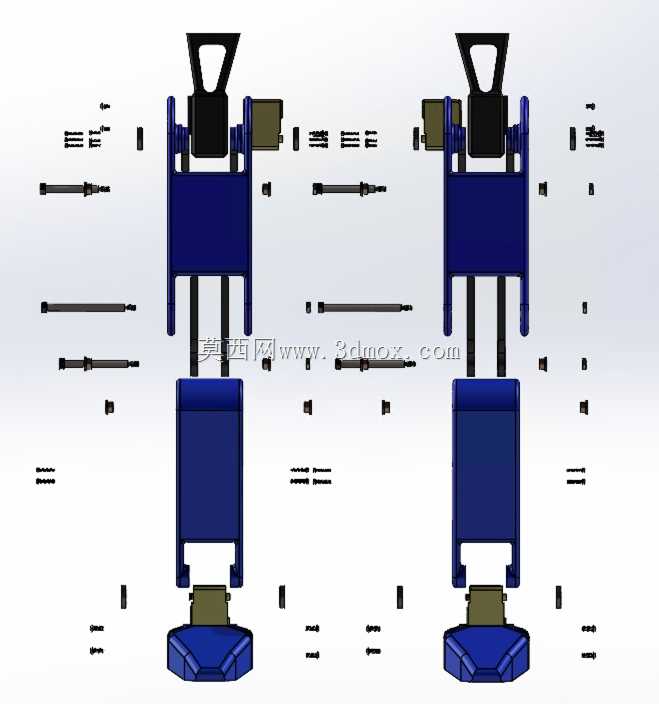
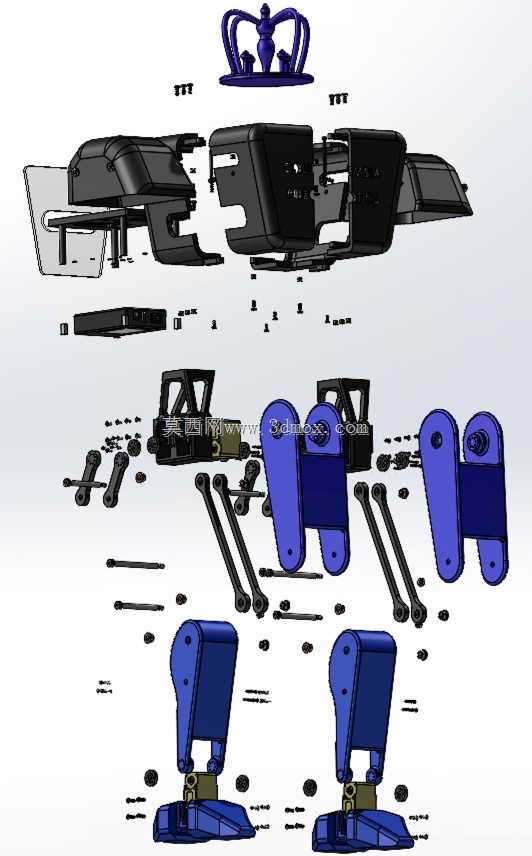













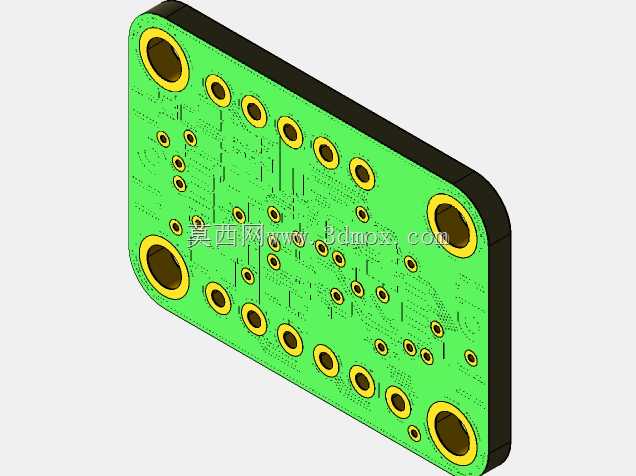





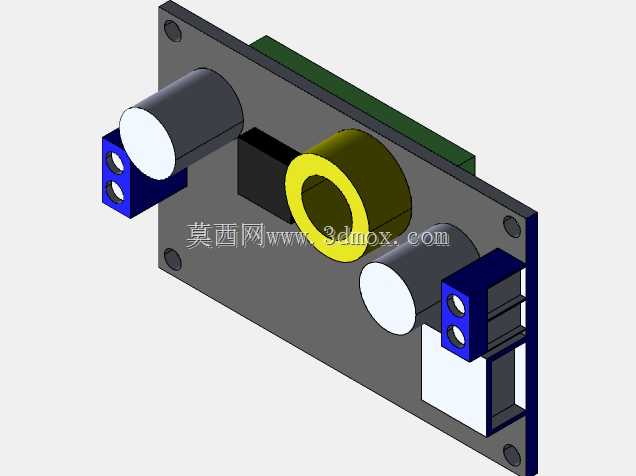


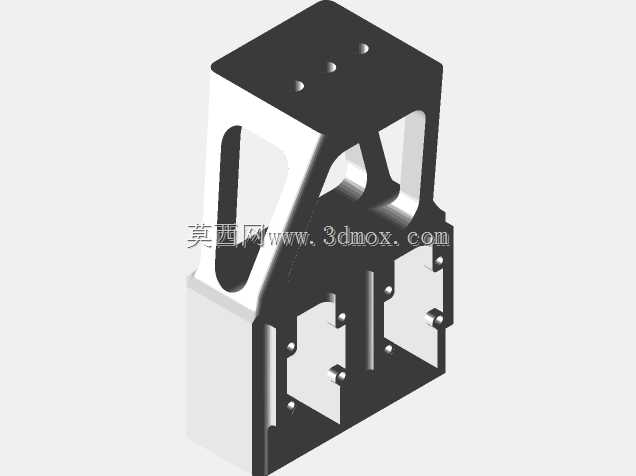



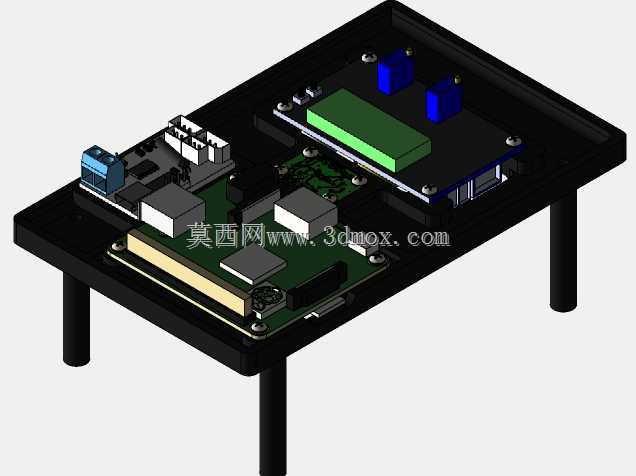


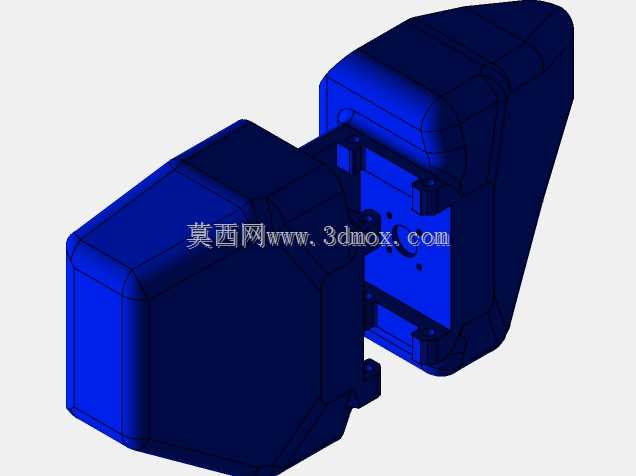
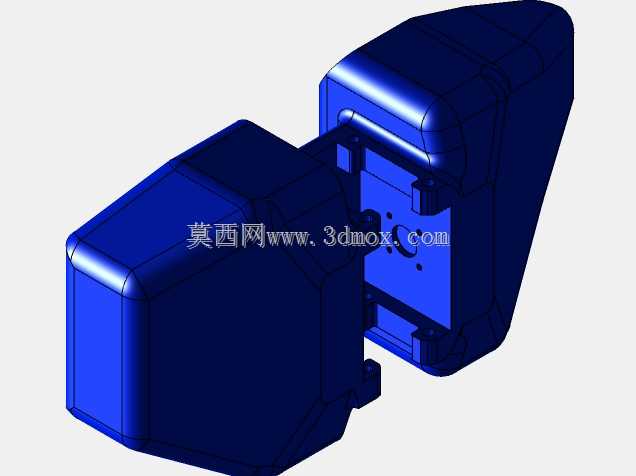






















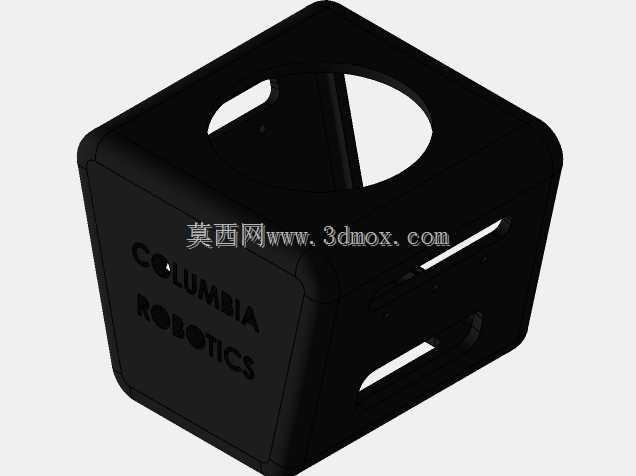
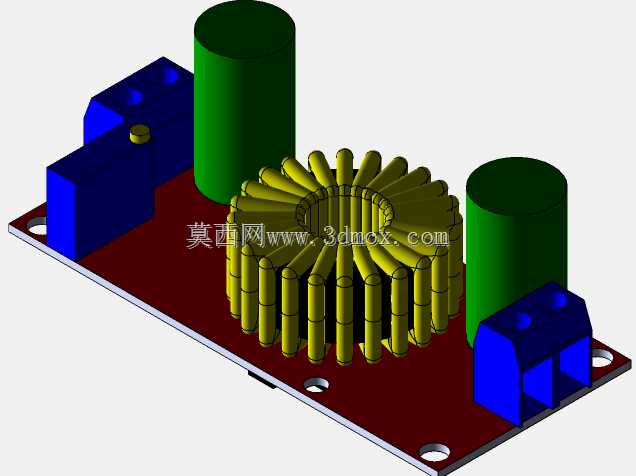
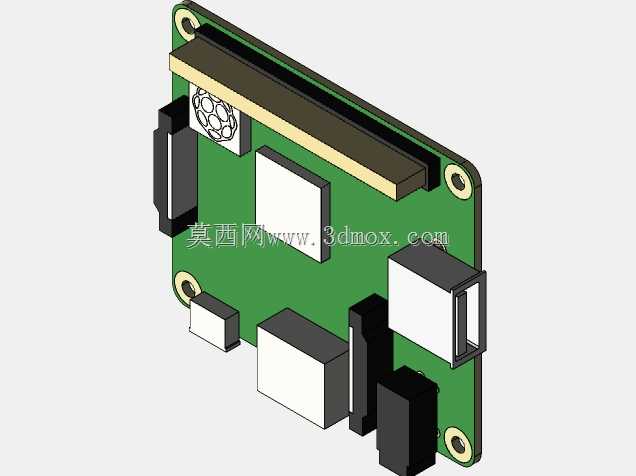

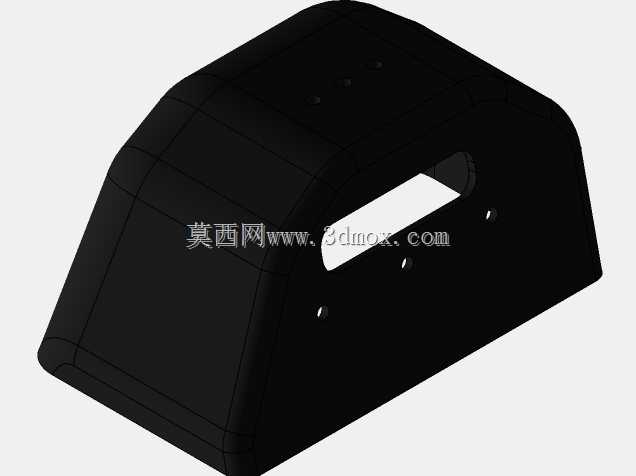











Albert Go和Delin Zeng受Cassie机器人的启发设计了一款两足机器人。我们的机器人有一些共同的小品质,但总体上大不相同。机器人的腿采用五杆联动机构,以避免电机直接位于膝关节处。在脚踝处放置了一个电机,看看我们是否可以教机器人将脚踝作为行走的起点。在制造和组装机器人后,我们将尝试使用强化学习来教机器人如何行走


- 模型大小 :167.59 MB
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Rendering,STEP / IGES,STL,AutoCAD


















