采用线性螺杆的机器人抓具机构
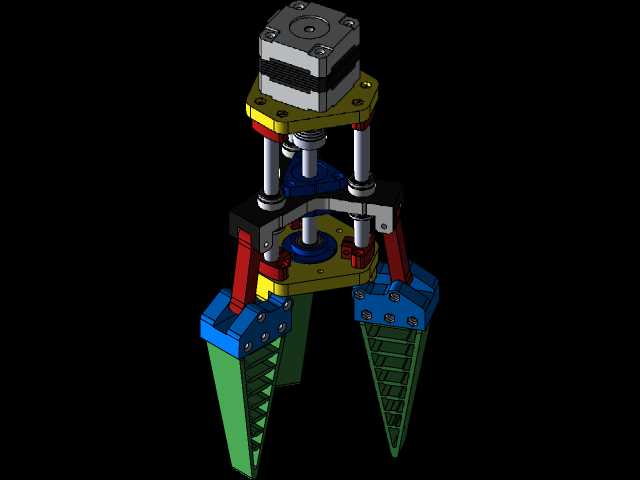




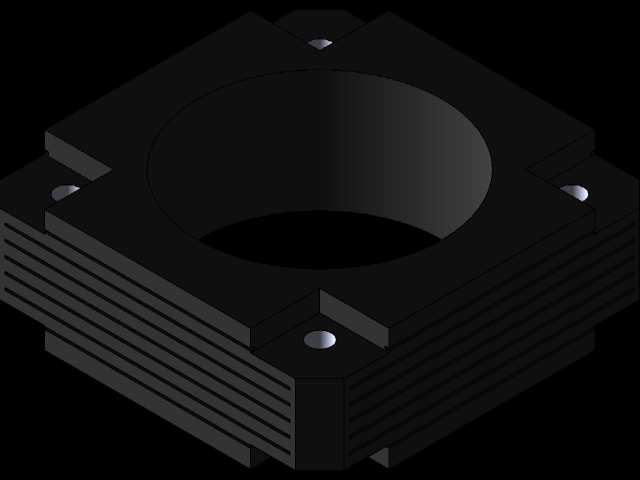
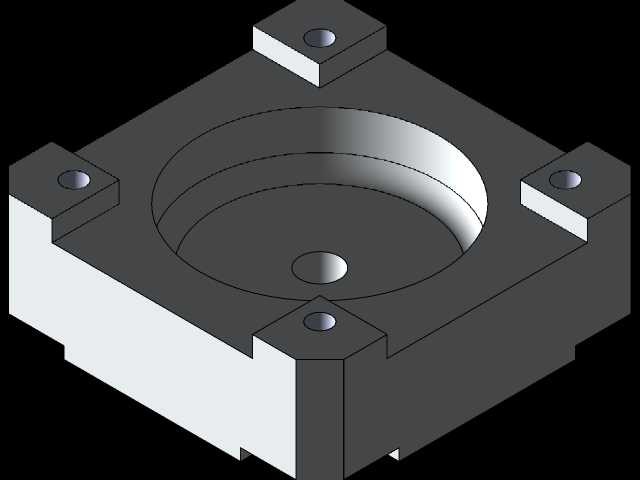
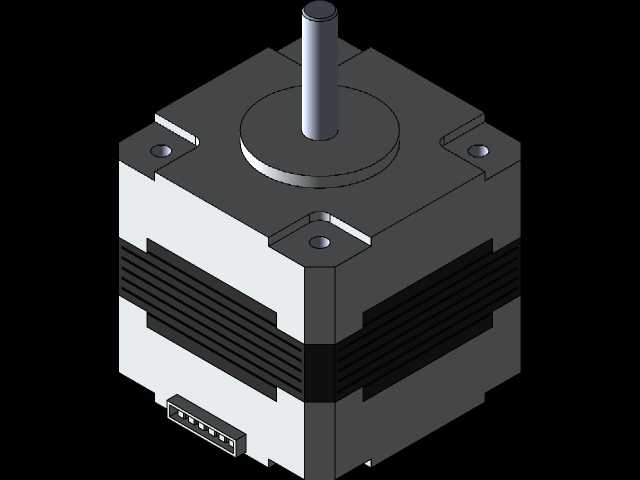

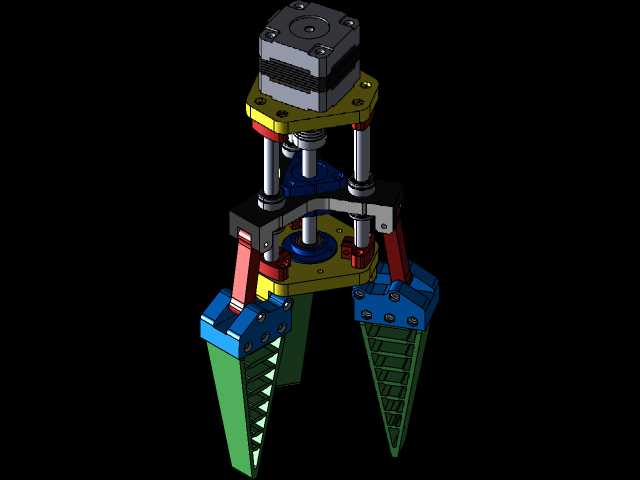
使用线性螺杆的机器人抓取机构是一种专门设计用于使机器人能够抓取和操纵物体的装置。设计的核心是线性螺杆执行器,它由一个电机驱动的旋转螺杆和一个相应的螺母组成。螺钉和螺母采用精确的螺纹精心建模,能够将旋转运动转换为线性运动。夹持元件附接到线性螺杆致动器的螺母,其可以是爪或指状物的形式。该设计结合了使用TPU专门建模和制造的钳口/指状物。TPU钳口/指形物设计具有一定的柔软度和灵活性,使其能够适应各种物体形状和尺寸。这种灵活性使夹持器机构能够牢固地夹持物体,而不会造成损坏或滑动
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,Snagit,STEP / IGES,STL,Rendering