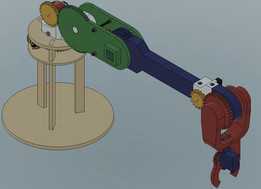
4 DoF迷你机械臂

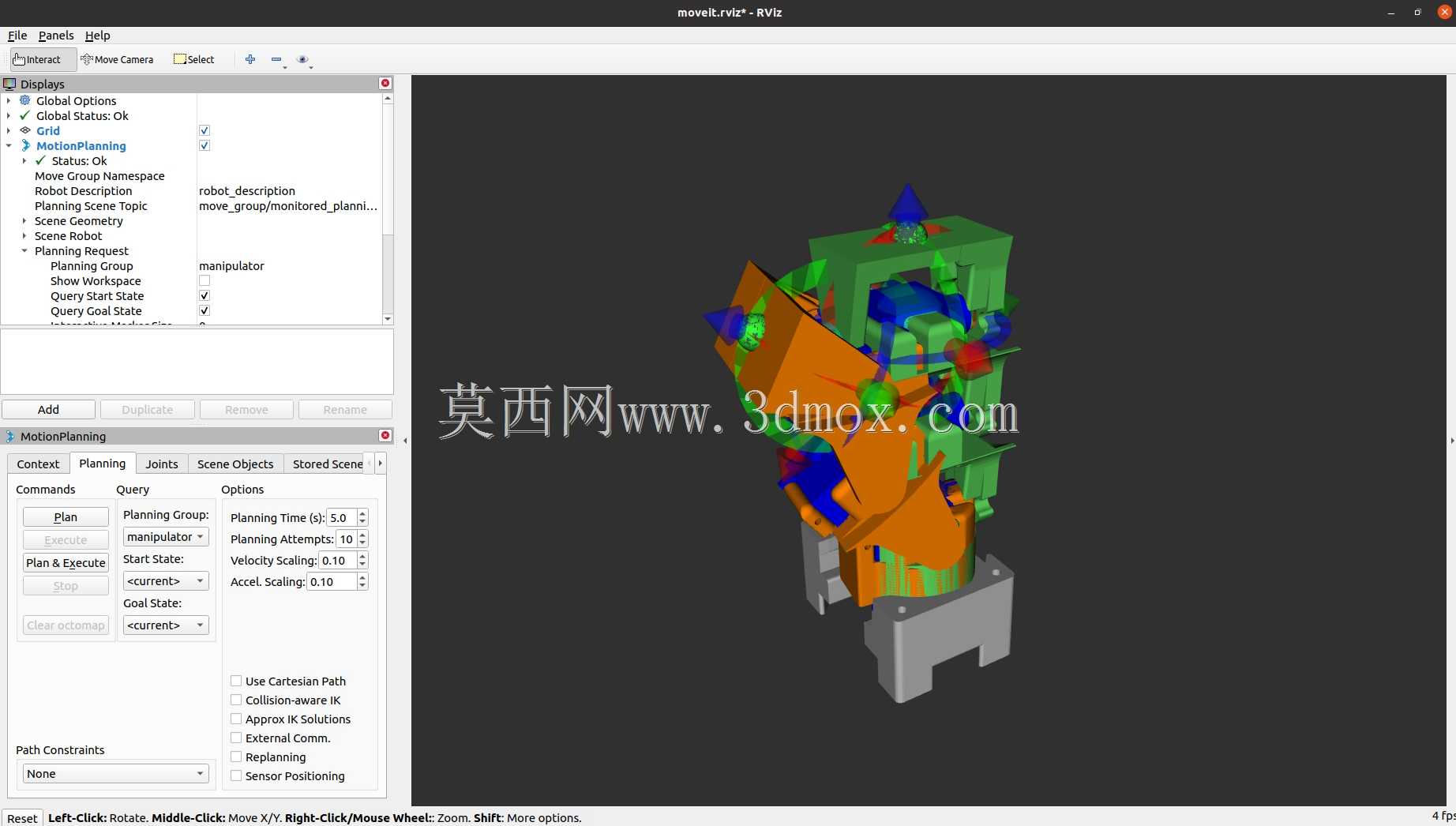
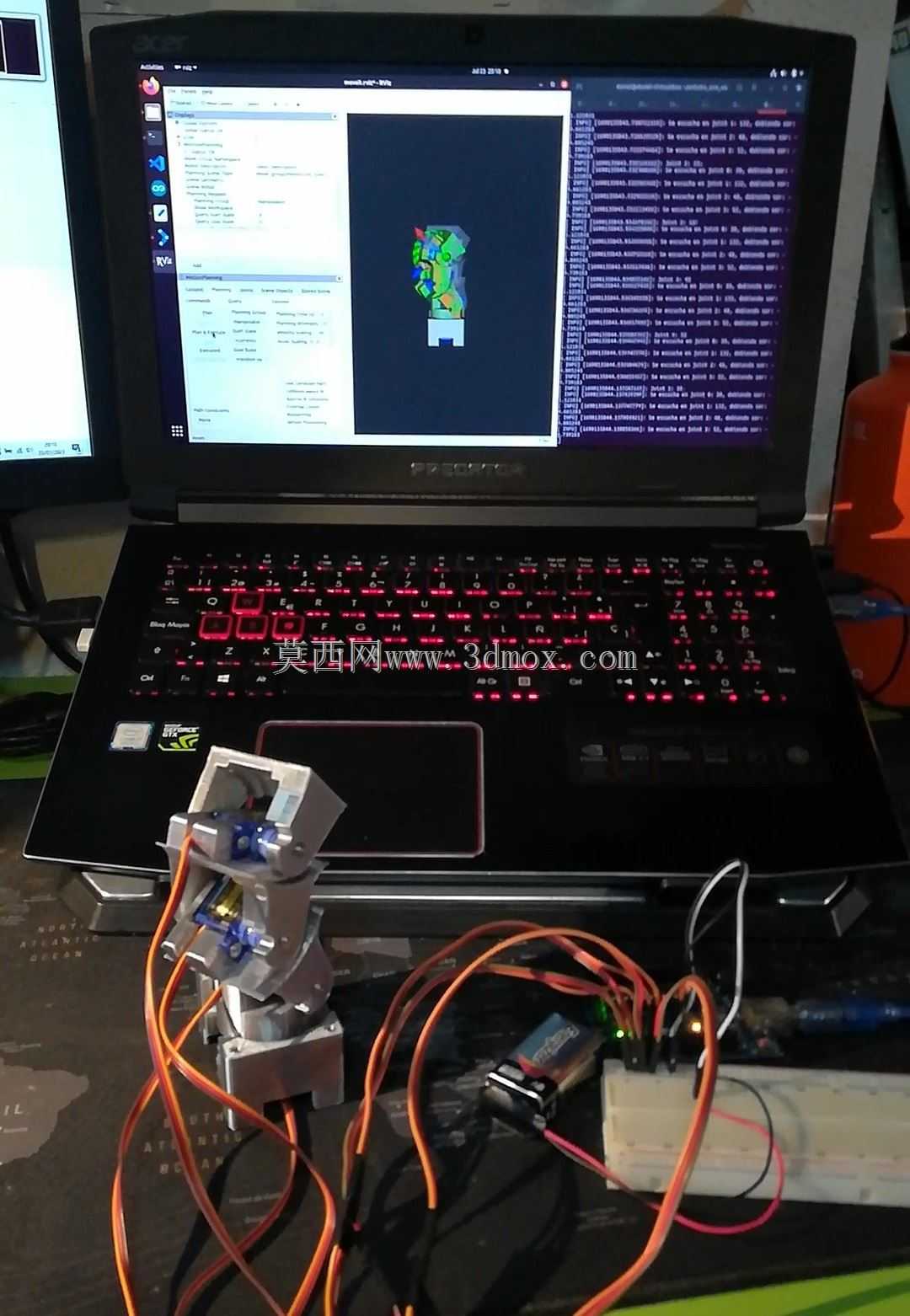
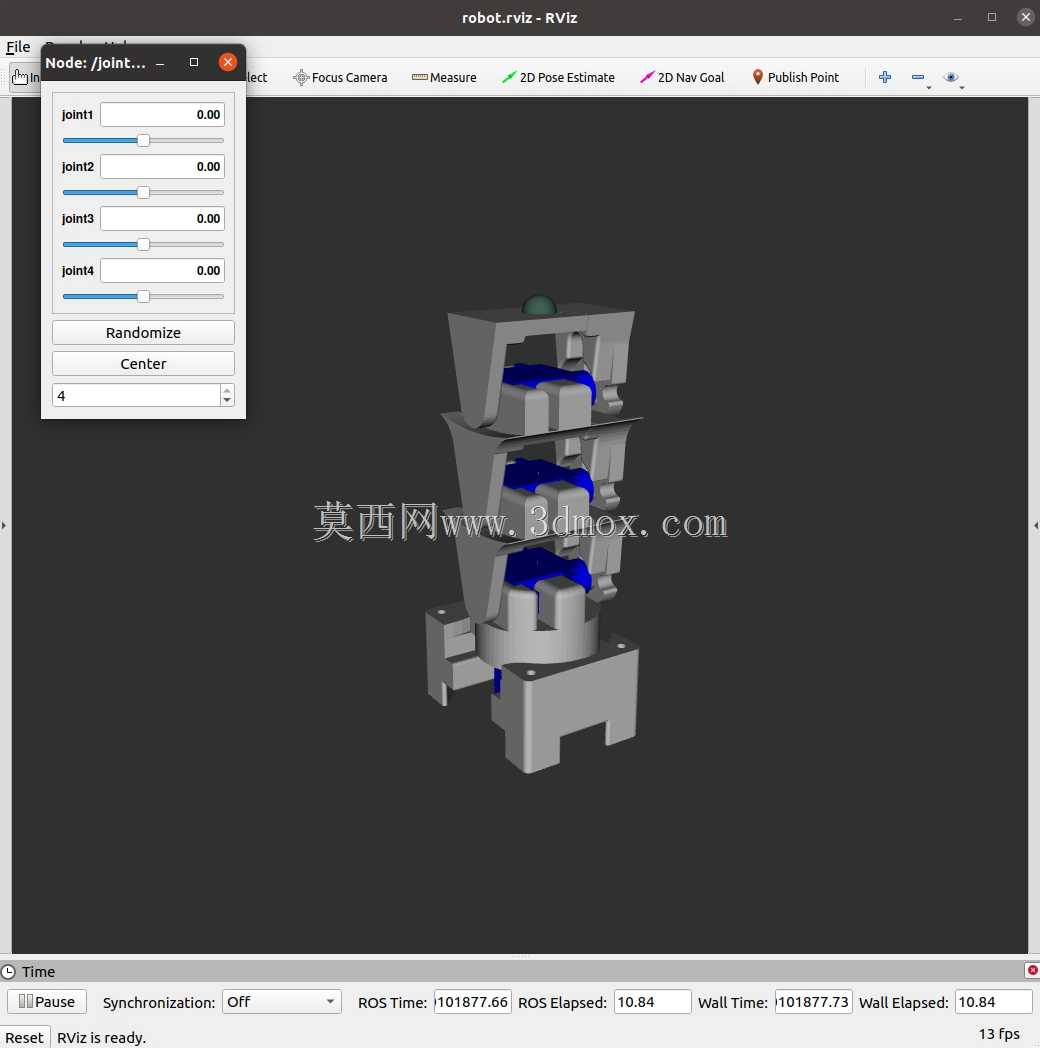
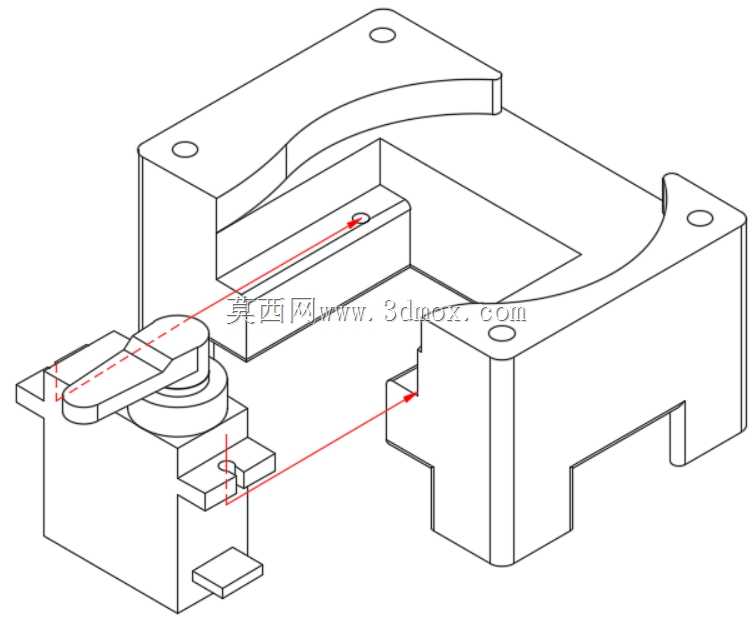
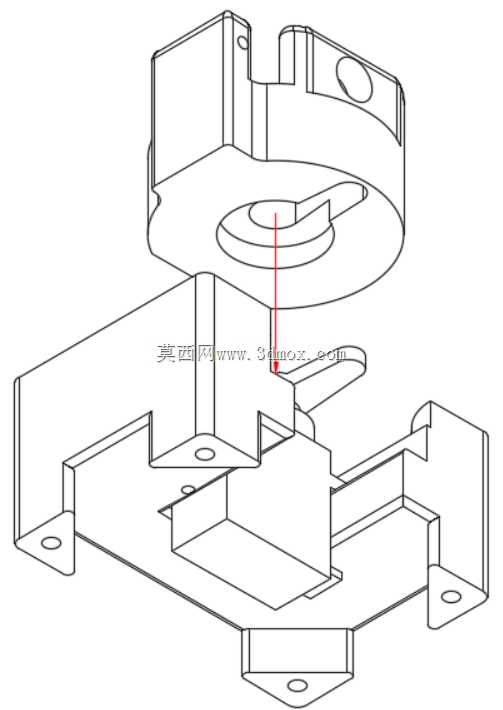
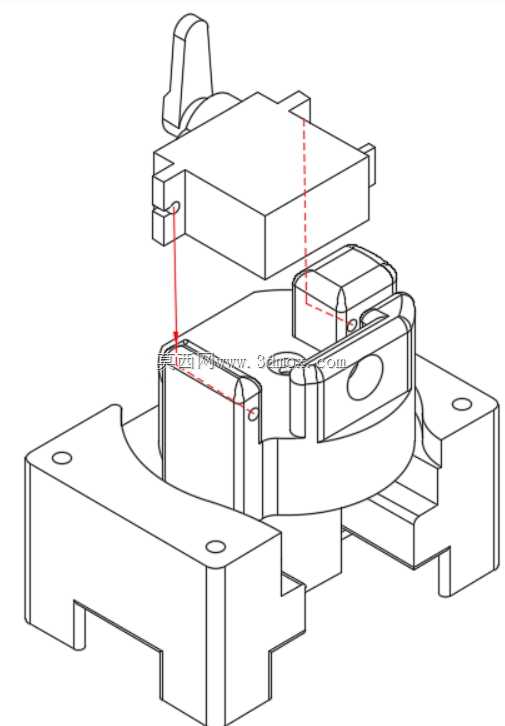
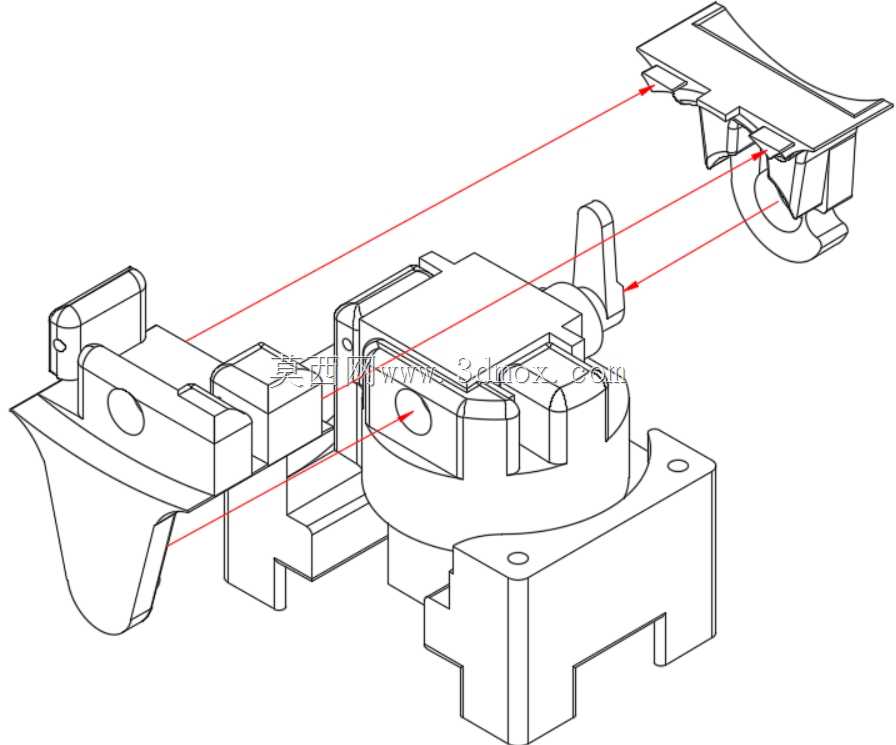
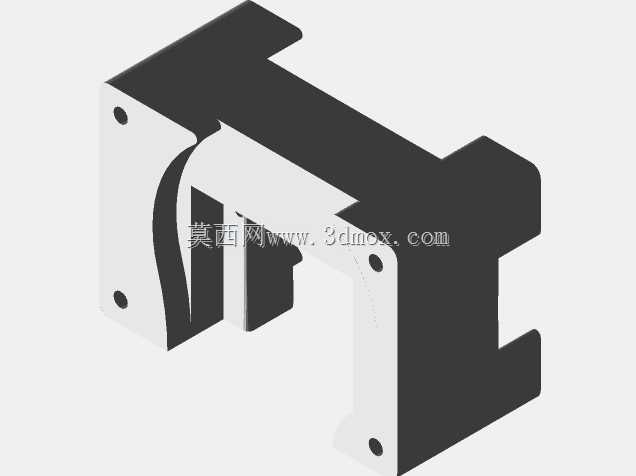

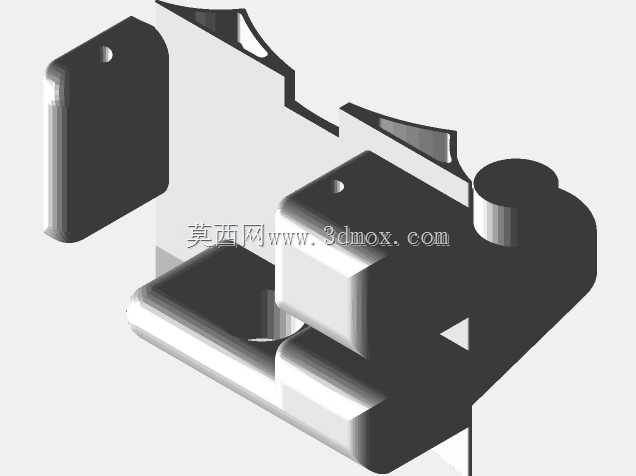
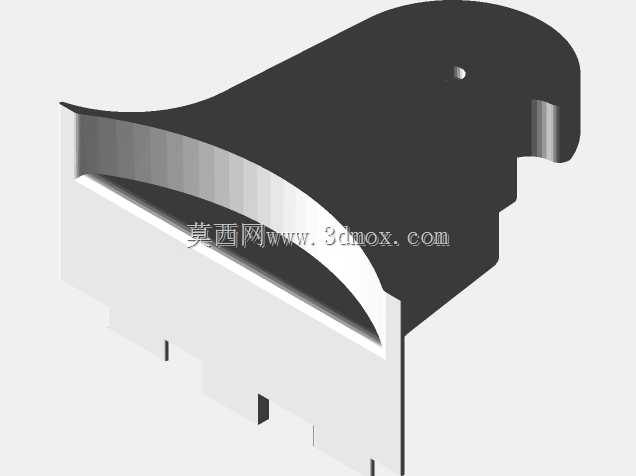
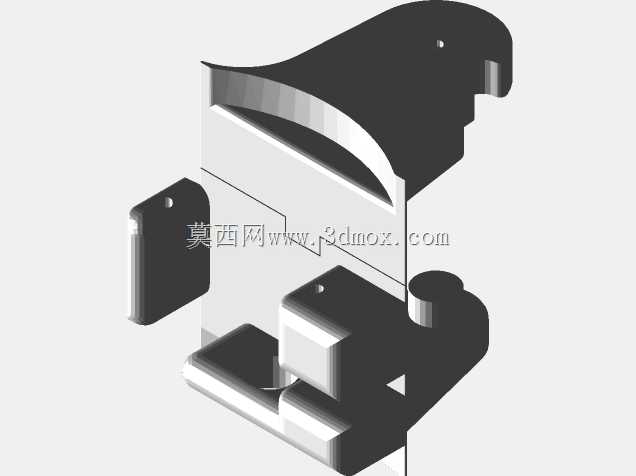


这是我在大学里为ROS课程制作的一个4自由度的小机械臂。该机器人被设计为使用sg90伺服电机,并通过串行控制。由于项目的范围仅考虑其运动,因此没有末端效应器。但是,如果您愿意,您可以打印任何链接,因为最后一个链接(链接4)是完全平坦的。要安装完整的机器人,每个伺服电机需要3个螺丝。这应该不是问题,因为这些电机都有上述螺丝。此外,您需要将a&;b连杆的零件(安装后)。这样,它使模型保持简单和轻便。对于结构,您需要两对链环2件(链环2a和链环2b)。也可以继续添加连杆2s以获得更多的自由度和长度,但由于臂的形式和sg90伺服系统的强度,我认为超过最初的4 DoF不是一个好主意。打印设置打印机品牌:Creality打印机:Ender 5筏:无支持:有分辨率:0.1填充:10细丝品牌:无所谓细丝颜色:无所谓长丝材料:PLA注意:打印确实取决于你的打印机,但有了这些设置,我就能打印出好的打印效果。打印后,你可能需要打磨链接2a、2b和4a、4b的接缝。实际上取决于您的打印设置。我不需要这么做


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Fusion 360,STL,Rendering