具有6个自由度的3D可打印机器人手臂


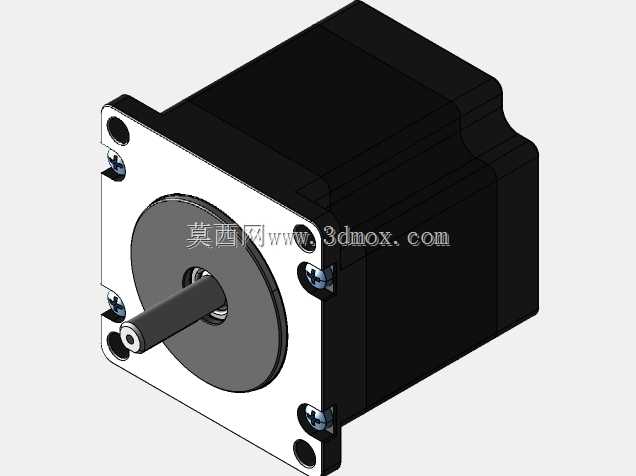
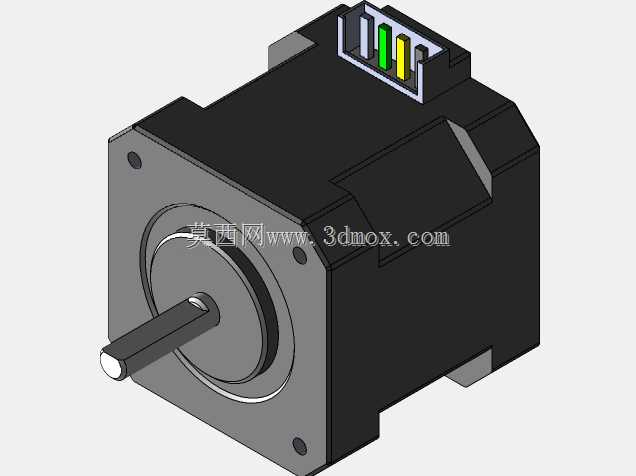


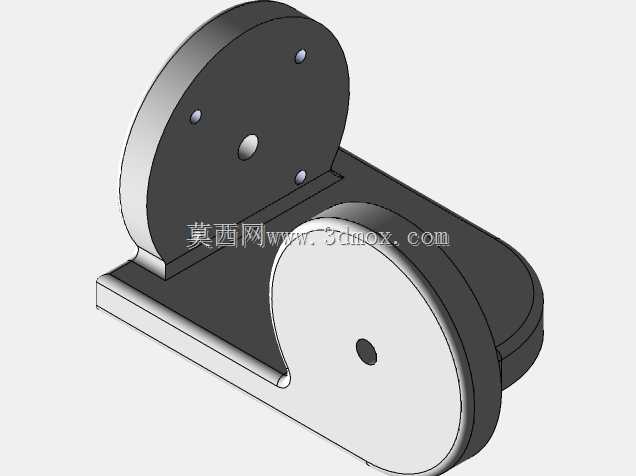


世界上大多数机器人都是为繁重、重复的制造工作而设计的。它们处理对人类来说困难、危险或无聊的任务。最常见的制造机器人是机械臂。一个典型的机械臂由七个金属部分组成,由六个关节连接。计算机通过旋转连接到每个关节的单个步进电机来控制机器人(一些较大的手臂使用液压或气动)。与普通电机不同,步进电机以精确的增量移动。这使得计算机能够非常精确地移动手臂,一遍又一遍地重复完全相同的移动。机器人使用运动传感器来确保其移动量刚好合适。所用电机:NEMA 17和NEMA 23(各2个)
------分隔线----------------------------
- 上一篇:压力开关-MJCSD-01-Steed
- 下一篇:注射器/注射

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :SOLIDWORKS,STEP / IGES,Other,Rendering