虾漫游机器人
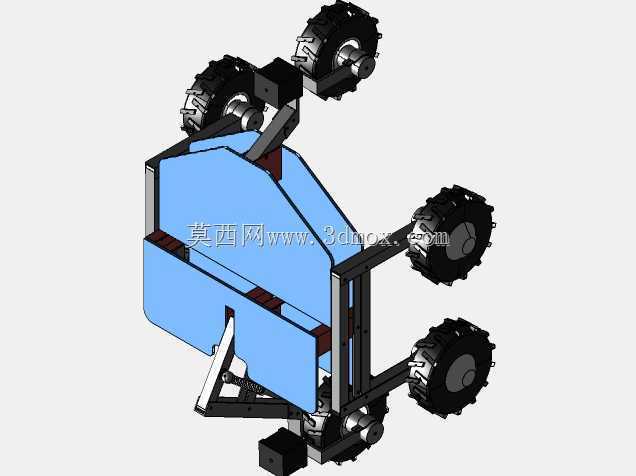
用于在非结构化环境中操作的虾漫游机器人。在崎岖的地形上导航是一项复杂的任务,需要将机器人视为一个整体系统。算法不考虑移动机器人的物理尺寸和能力,导致运动效率低下,缺乏鲁棒性。3d设计展示了如何通过设计虾漫游机器人来解决这个问题,使其能够解决挑战并适应当地的地理地形


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Fusion 360,Rendering




用于在非结构化环境中操作的虾漫游机器人。在崎岖的地形上导航是一项复杂的任务,需要将机器人视为一个整体系统。算法不考虑移动机器人的物理尺寸和能力,导致运动效率低下,缺乏鲁棒性。3d设计展示了如何通过设计虾漫游机器人来解决这个问题,使其能够解决挑战并适应当地的地理地形