ARMS-高级约束和移动系统

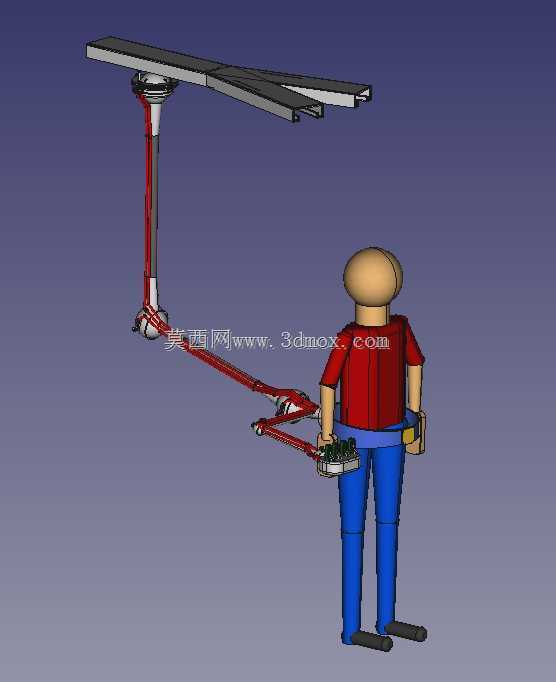

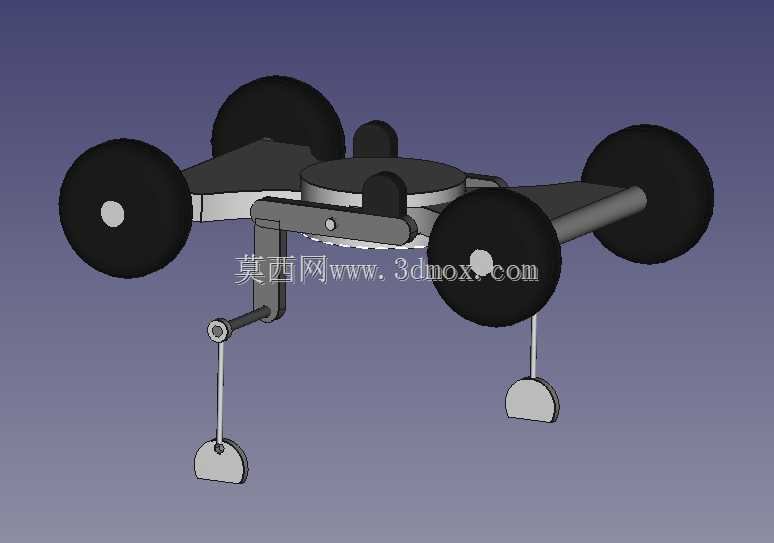
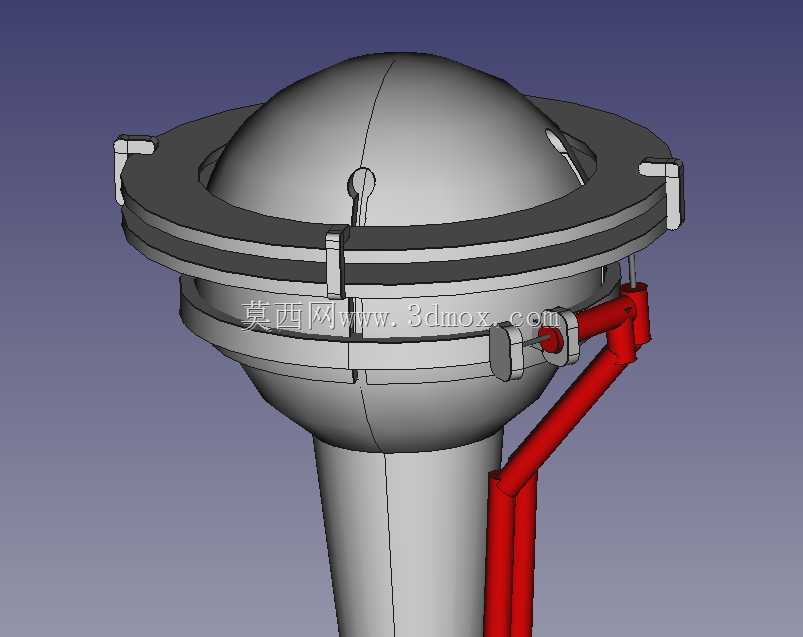
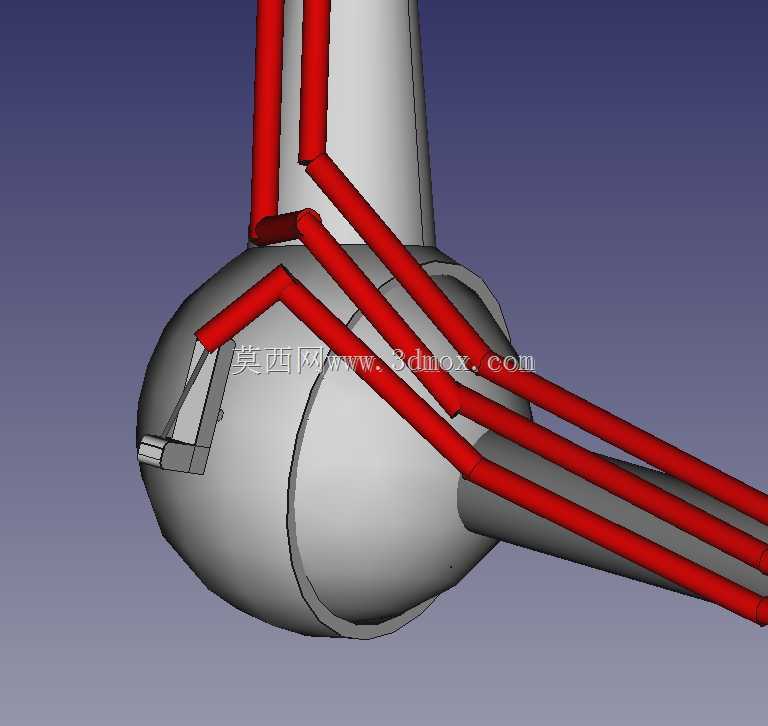
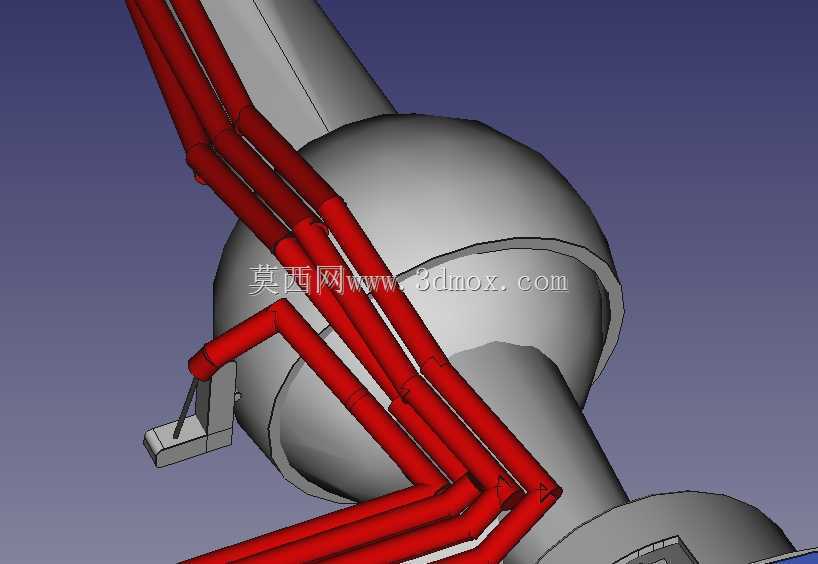
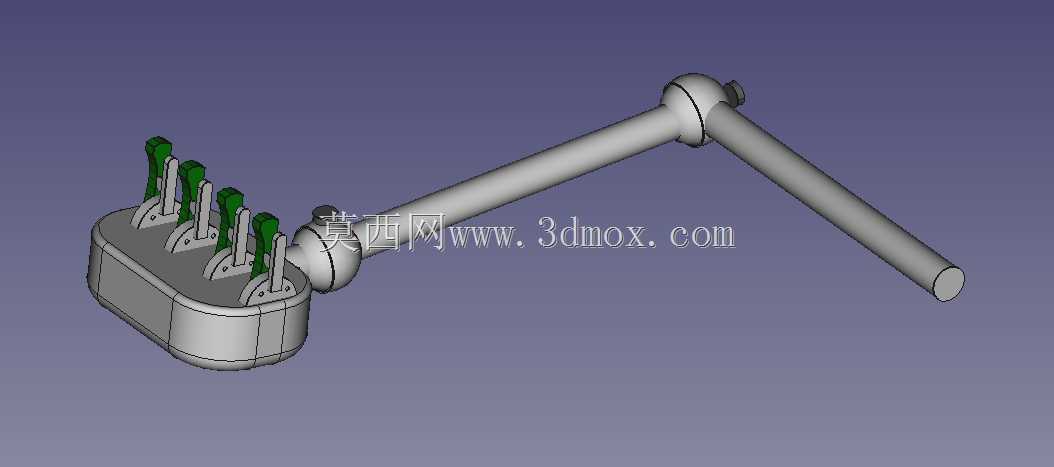
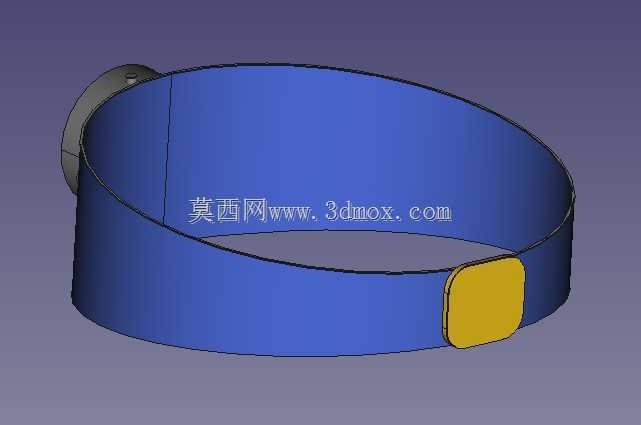
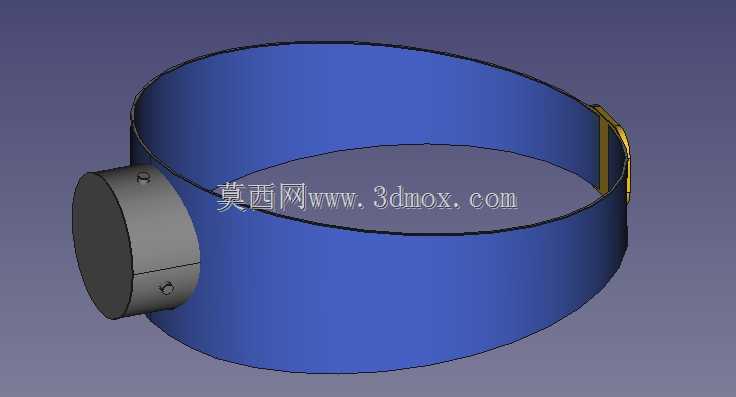


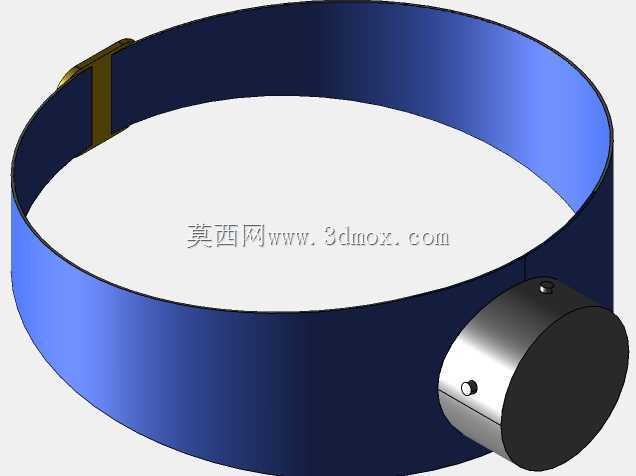



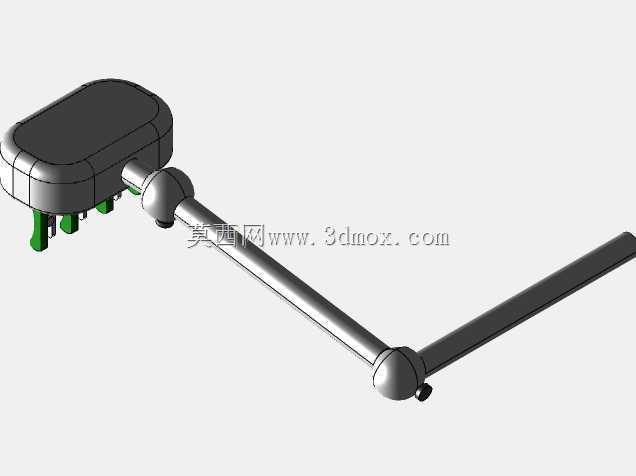

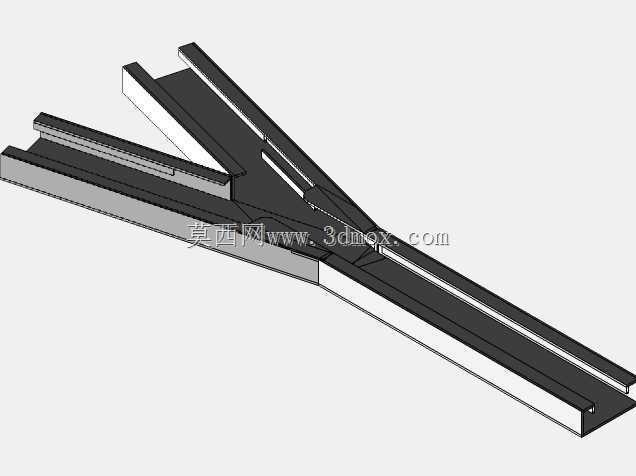







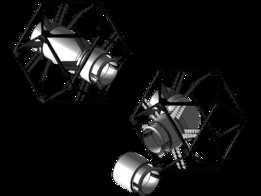
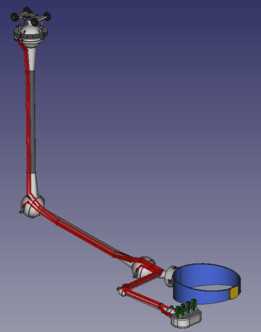
Outward Technologies设想了一种半柔性被动约束和移动系统,以帮助宇航员在多种重力环境中在栖息地工作或移动时提供帮助。这种先进的约束和移动系统(ARMS)由一个轨道系统组成,可以安装在任何天花板、地板或墙壁上,引导四轮车在栖息地周围行驶。带有三个球窝关节的被动臂连接到推车上,另一端连接到宇航员佩戴的皮带上。该臂配有四个杠杆,可用于独立锁定臂的每个关节以及轨道车。在低重力环境中,宇航员可以通过将关节锁定在适合行走的位置来穿越栖息地,并开始依靠自己的力量行走。半柔性臂将使宇航员即使在微重力条件下也能正常行走,因为它可以抵抗垂直反作用力,而不会过于僵硬,完全扼杀垂直运动,否则将迫使宇航员采取改变的步态。一旦宇航员到达预定目的地,他们可以使用任何或所有锁定杆将自己固定到位。在任何时候,宇航员都可以使用快速释放系统将安全带从手臂上松开
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STL,STEP / IGES,Other,Rendering