RASSOR_挑战_迈克_伊图贝

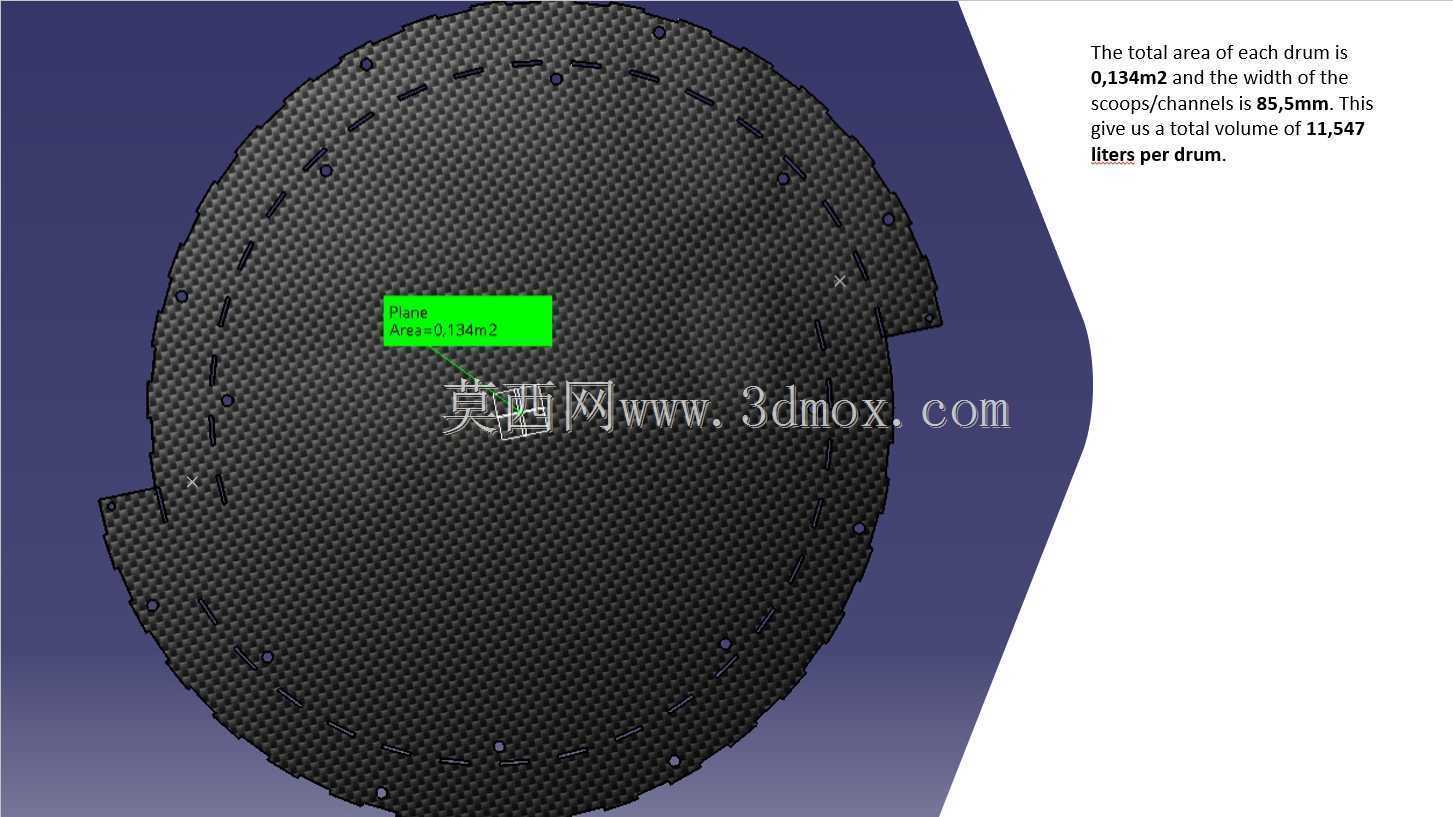


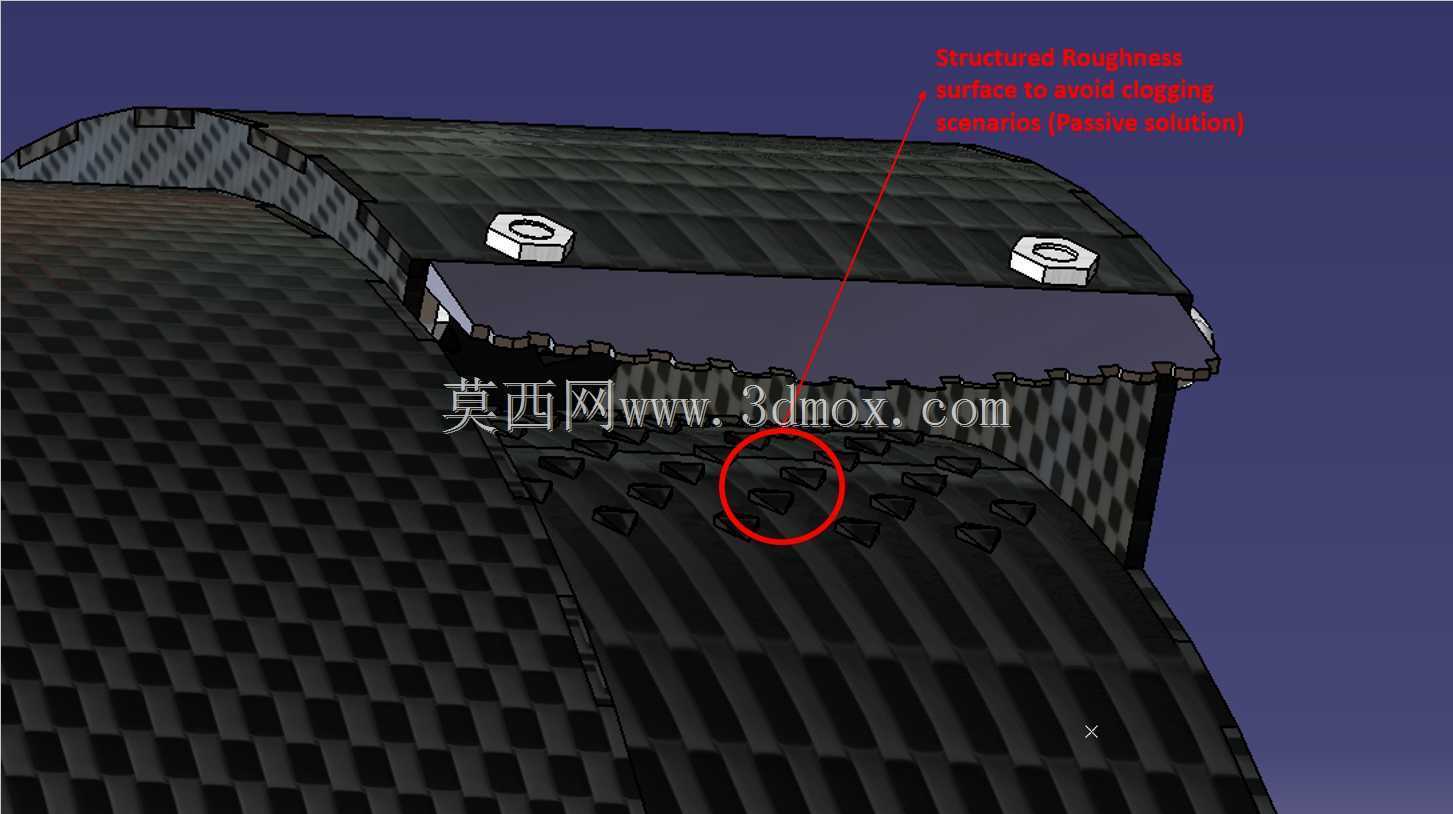
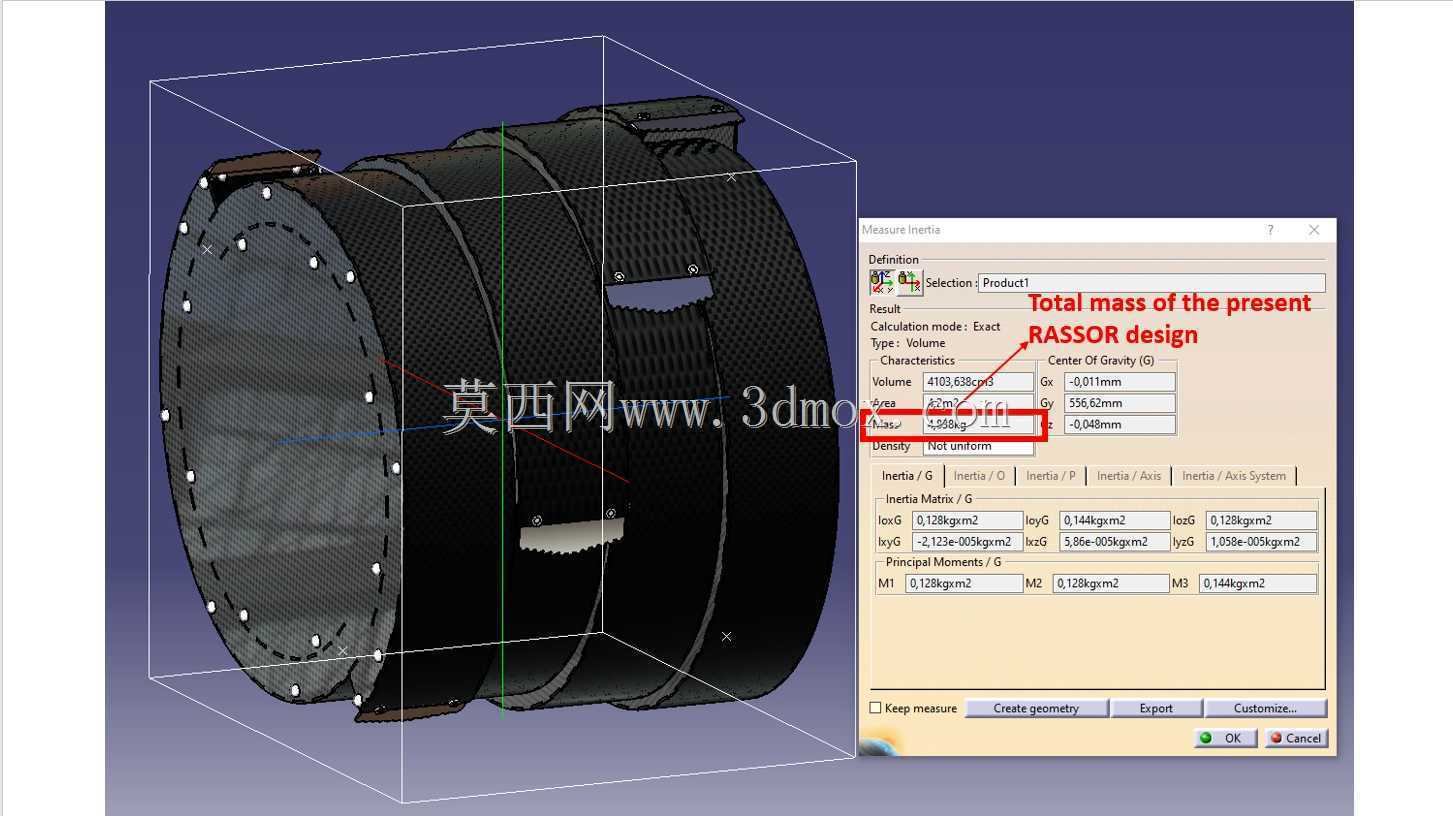
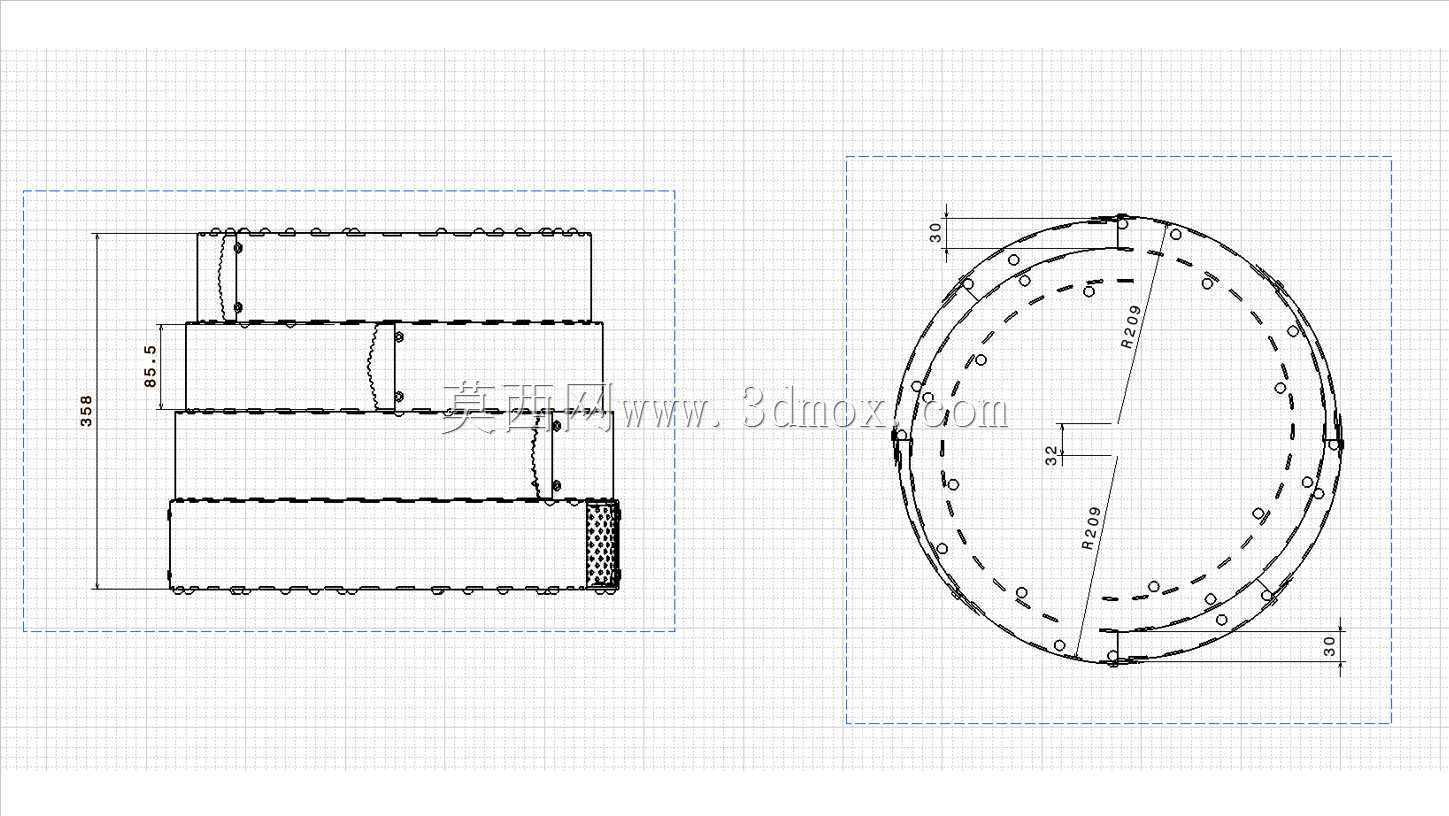

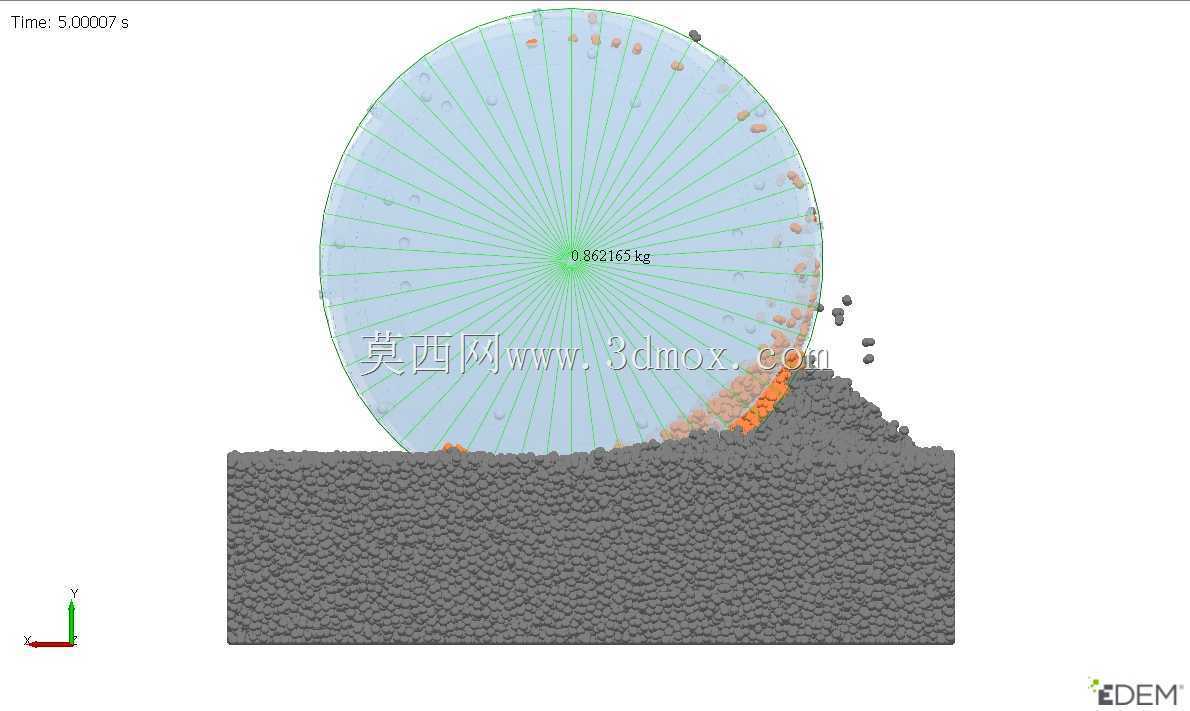
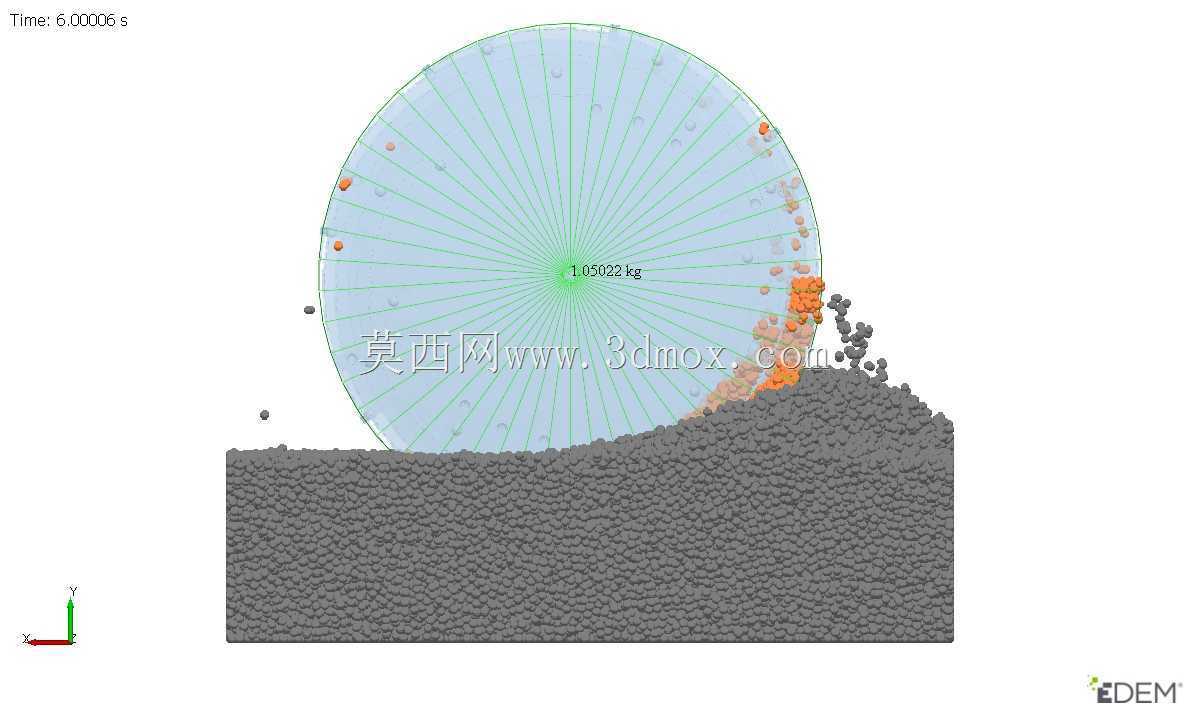
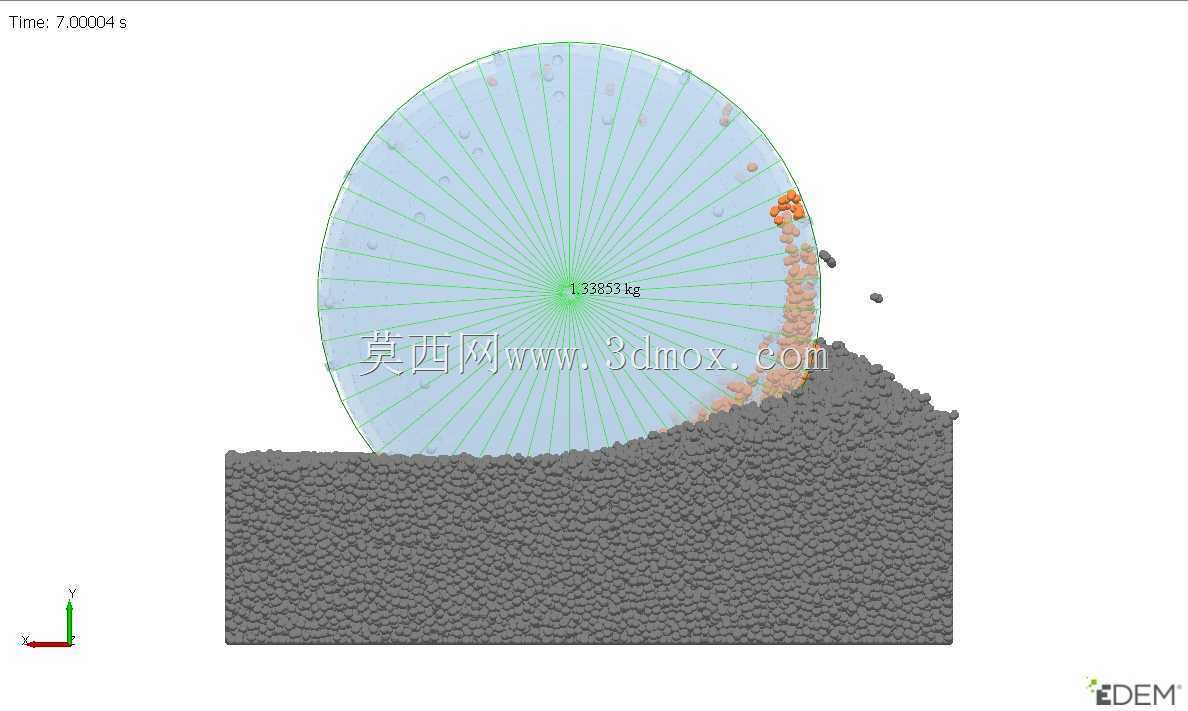
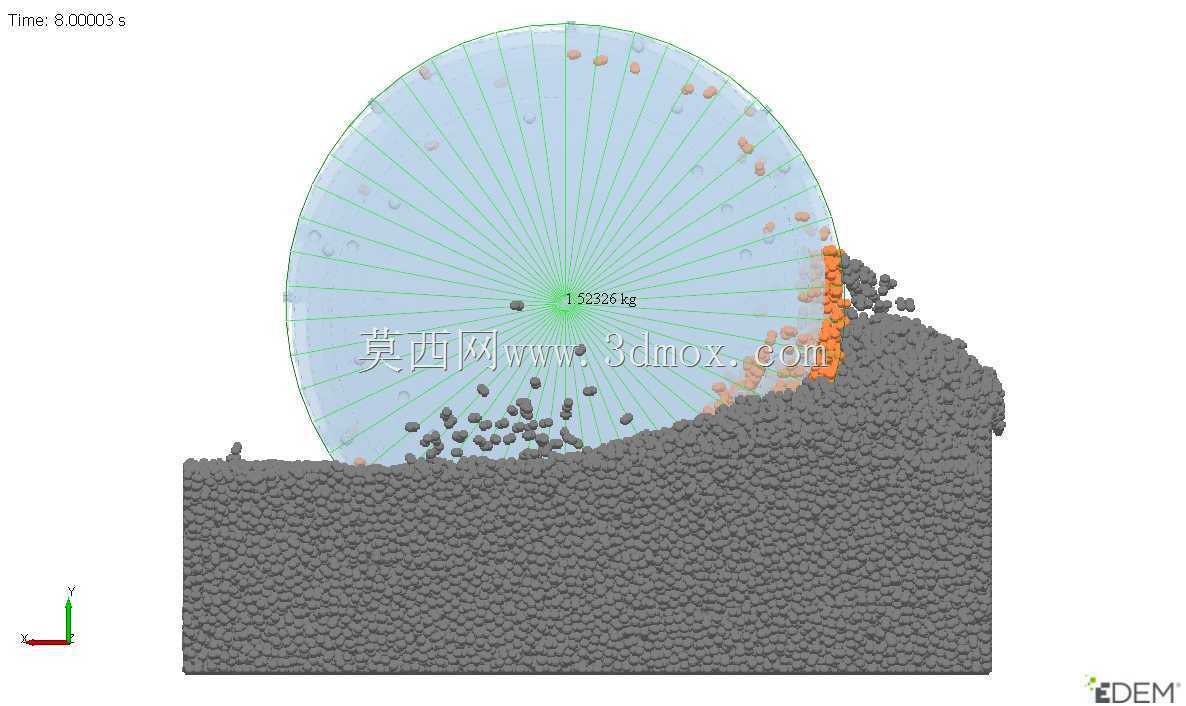
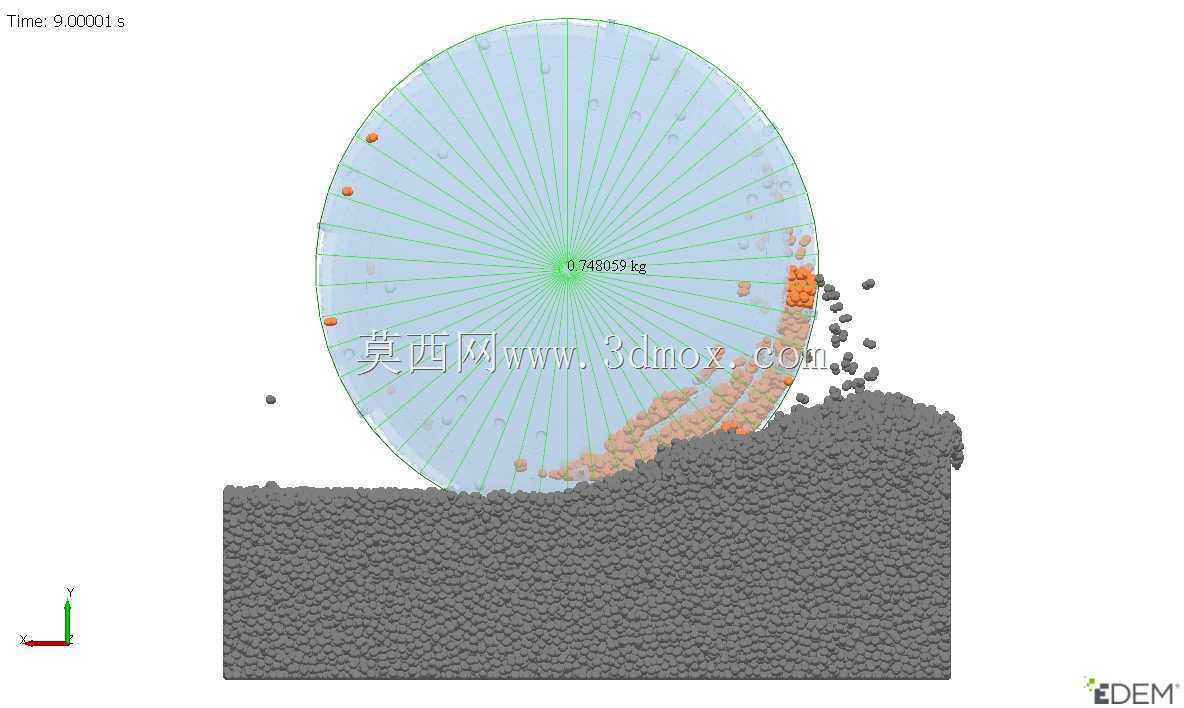
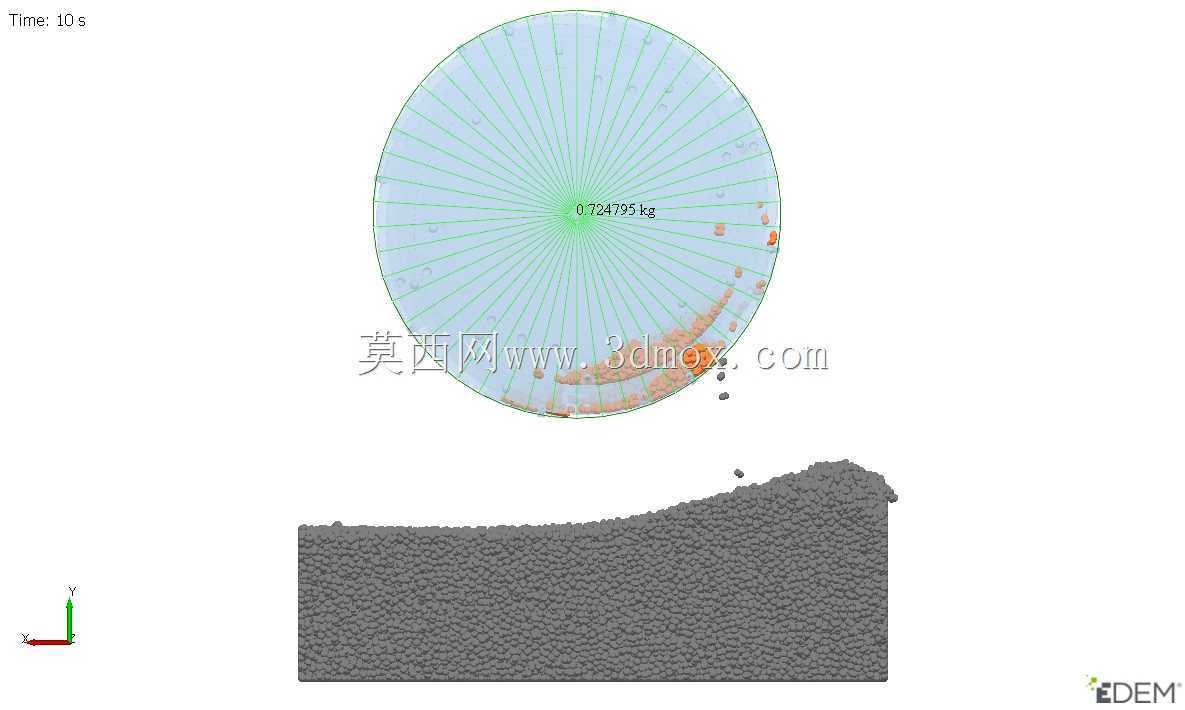
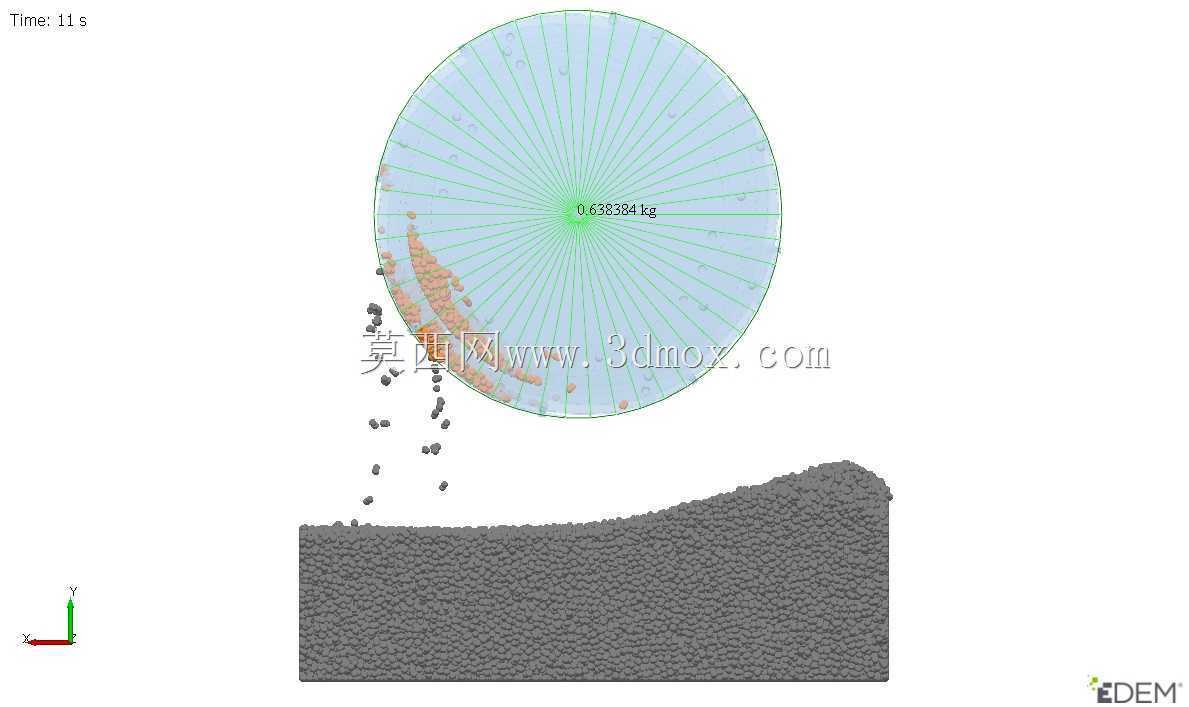
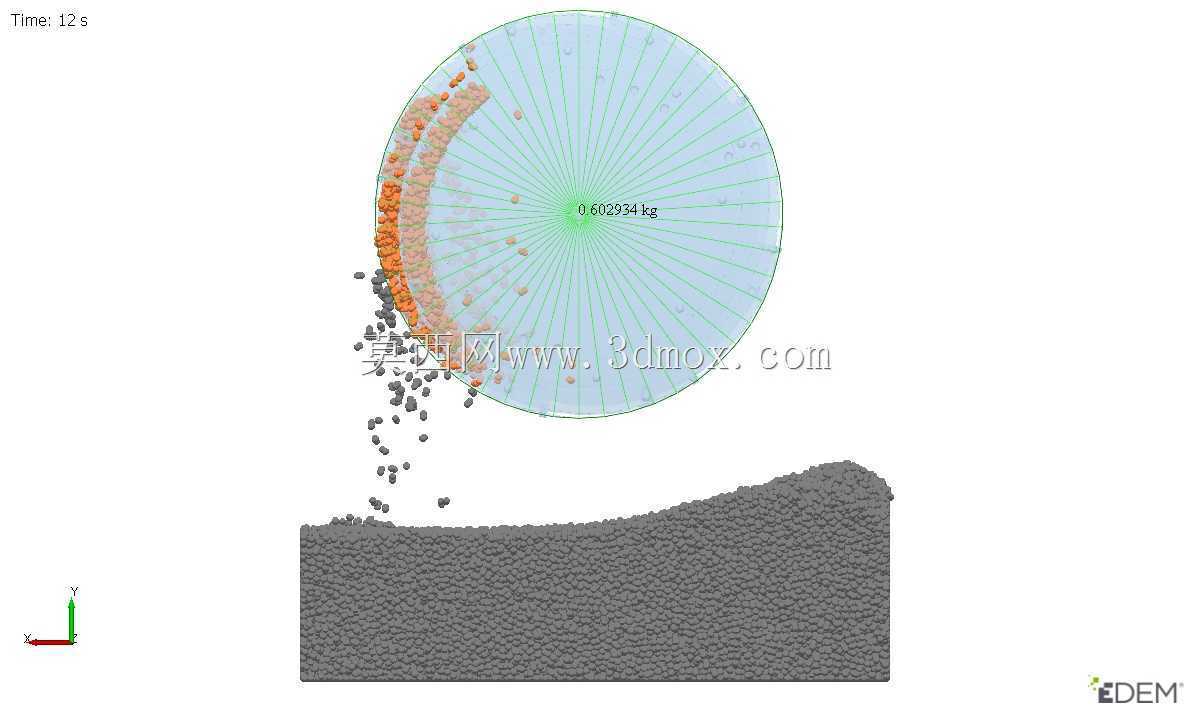
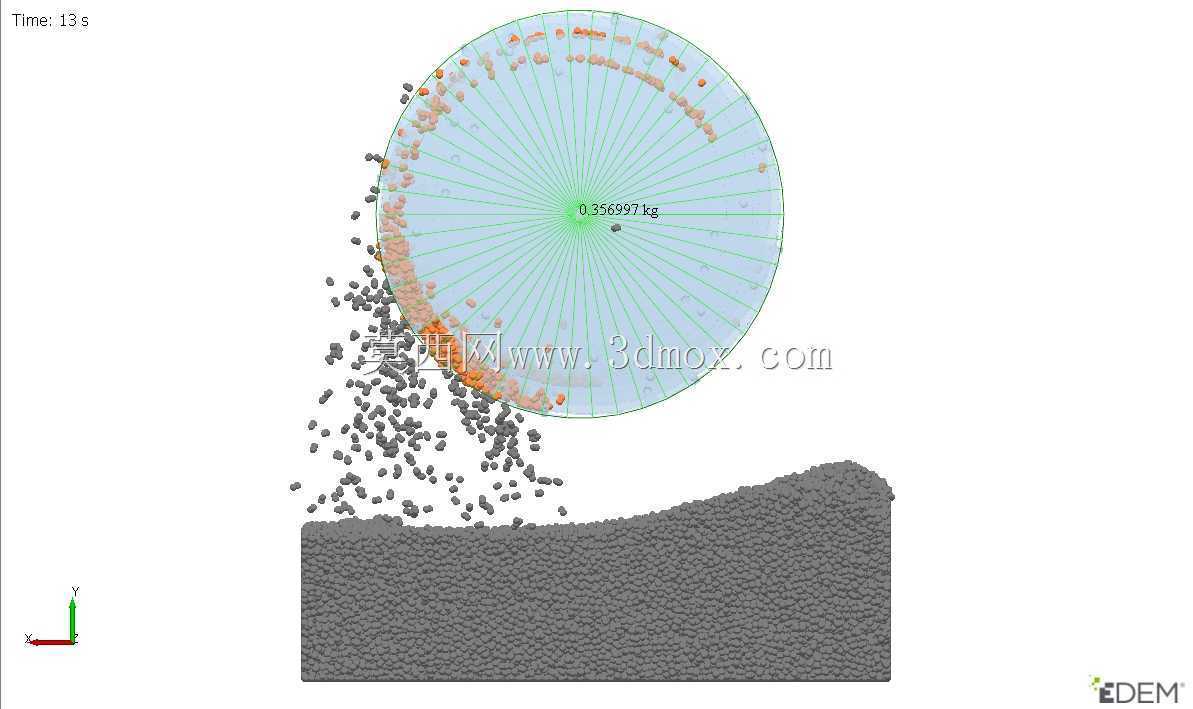
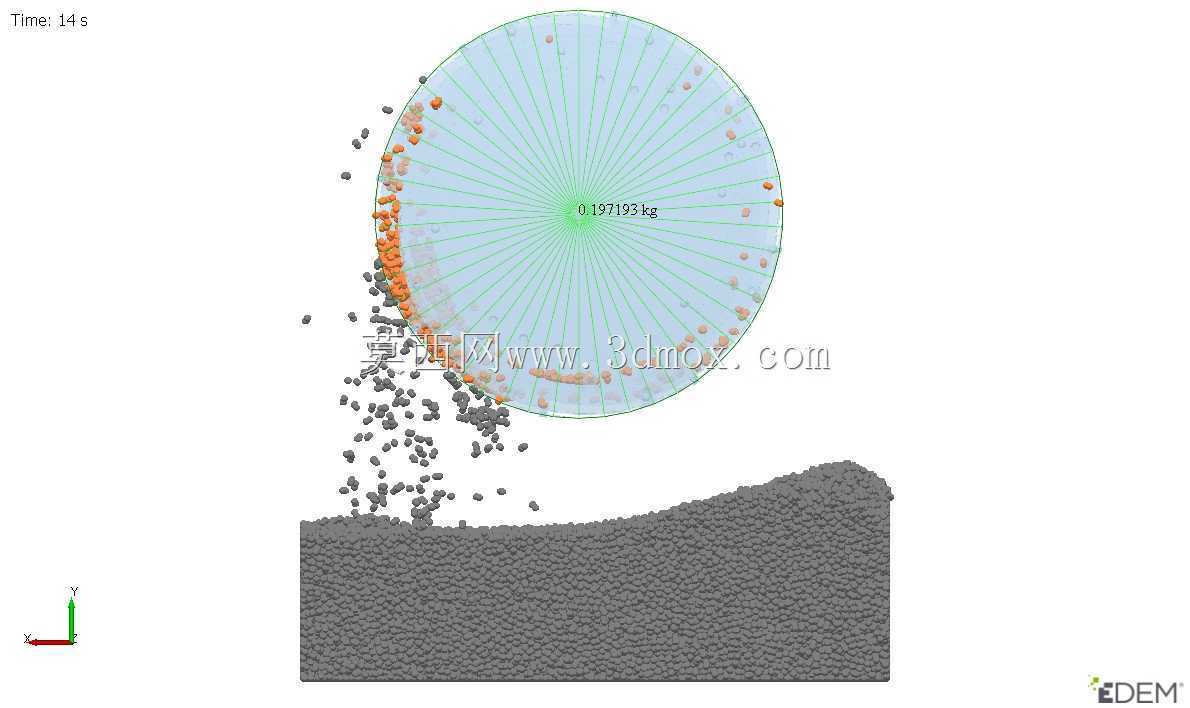
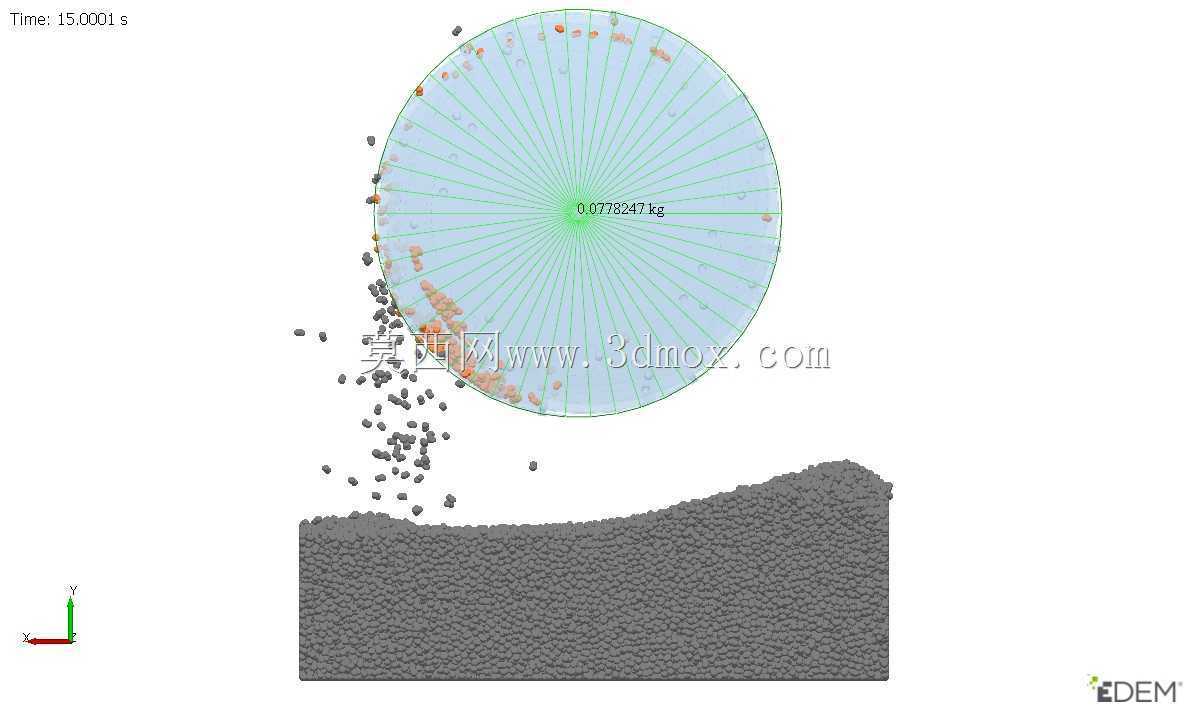
设计工作原理和预期填充比)设计工作原理目前的RASSOR设计有四个桶,每个桶有两个勺子。每个鼓之间相差45度。因此,在任何给定时间,只有一两个勺子在风化层中工作,以保持美国国家航空航天局开发的实际RASSOR设计的低反作用力。每个滚筒都有两个通道,在装载和卸载过程中,风化层分别通过这两个通道进出。这些通道超过180度,壁之间的距离保持不变(以避免可能的堵塞),因此当下勺捕获了特定量的月球风化层并再次上升时,当上勺达到卸载滚筒内风化层的倾斜角度时,滚筒内的物质不会通过上勺掉出。只有当每个滚筒有两个通道,并且每个滚筒在容纳材料时与其他滚筒没有内部连接时,才有可能在本设计中装载月球风化层。由于在第一次RASSOR设计的测试阶段,大通道的角度超过180度,勺中存在堵塞问题,因此在通道壁上加入了结构化粗糙表面,如附图所示,作为被动解决方案,以避免可能的堵塞情况。如[1]中所定义,结构化粗糙表面在避免由于这种表面产生的剪切应力而导致的可能堵塞情况方面具有很强的影响。“研究结果表明,剪切应力对锥形通道堵塞倾向的重要性。较高的剪切应力抑制了颗粒附着在通道壁上,从而延缓了颗粒在通道壁积聚引起的通道堵塞”[2]。b) 预期填充率每个滚筒的总面积为0134m2,铲斗/通道的宽度为85.5mm。这使我们每个桶的总容量为11547升。如附图所示,预期填充区域的直径为351mm。因此,预期捕获的体积约为8273升/桶。(考虑到铲斗/通道的宽度为85.5mm)填充比=(8273/11547)x 100=71.6%拟捕获的总体积=4桶x 8273升/桶=33.092升,设计真实吗?这个设计可行吗?它真的能被创造出来吗?目前的RASSOR设计使用密度为2640 kg/m3的铝金属板作为铲斗。波尔
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Other,Rendering