机器人手臂




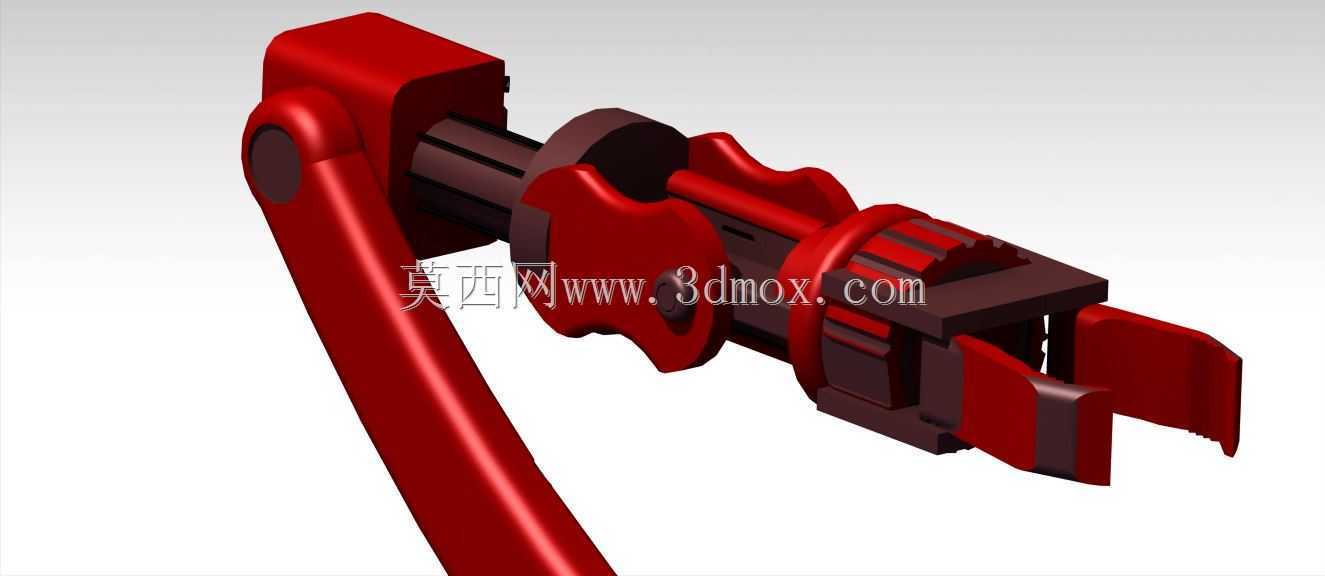




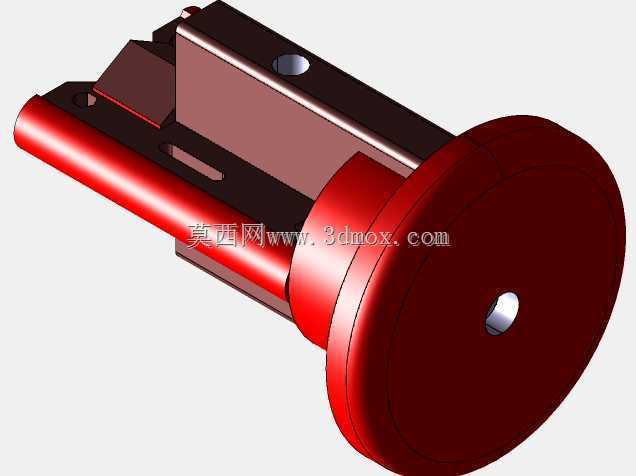
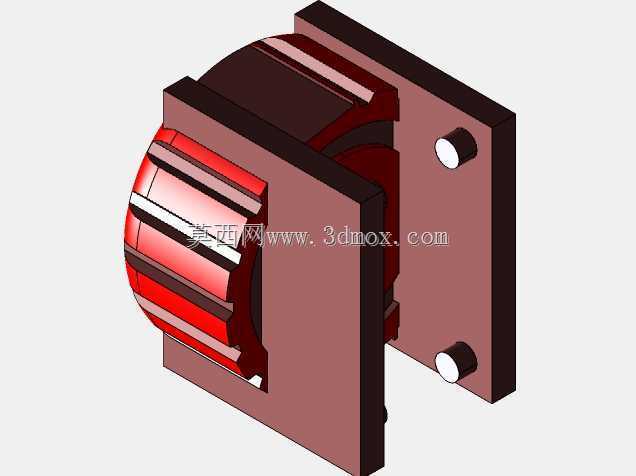

机器人手臂是一种机器人手臂,旨在执行一系列通常由人类手臂执行的任务。它由一系列可以在多个方向上移动的机械接头组成,可以由计算机或操作员控制。机器人手臂可用于各种各样的应用,如装配线制造、材料搬运、焊接,甚至在医疗领域进行外科手术。机器人手臂通常配备有各种传感器,如力传感器或接近传感器,使它们能够与环境互动,检测障碍物或周围环境的变化。它们可以被编程以高精度和准确度执行一系列任务,使其在需要一致性能和可重复性的情况下非常有用。此外,一些机器人手臂被设计用于在人类可能不安全的危险环境中工作,例如在核电站或其他工业环境中
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :CATIA,Rendering