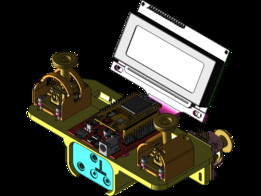
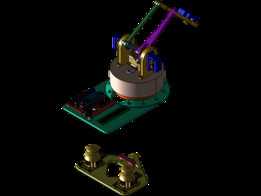
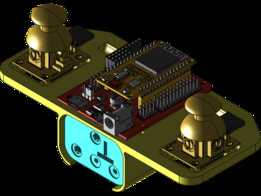
使用ESP32的基本WIFI操纵杆
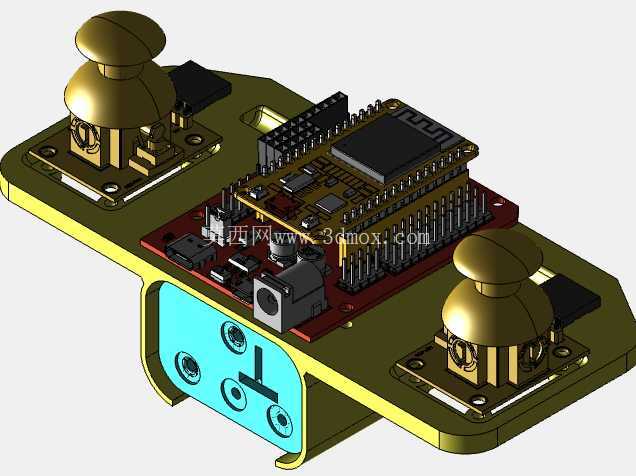
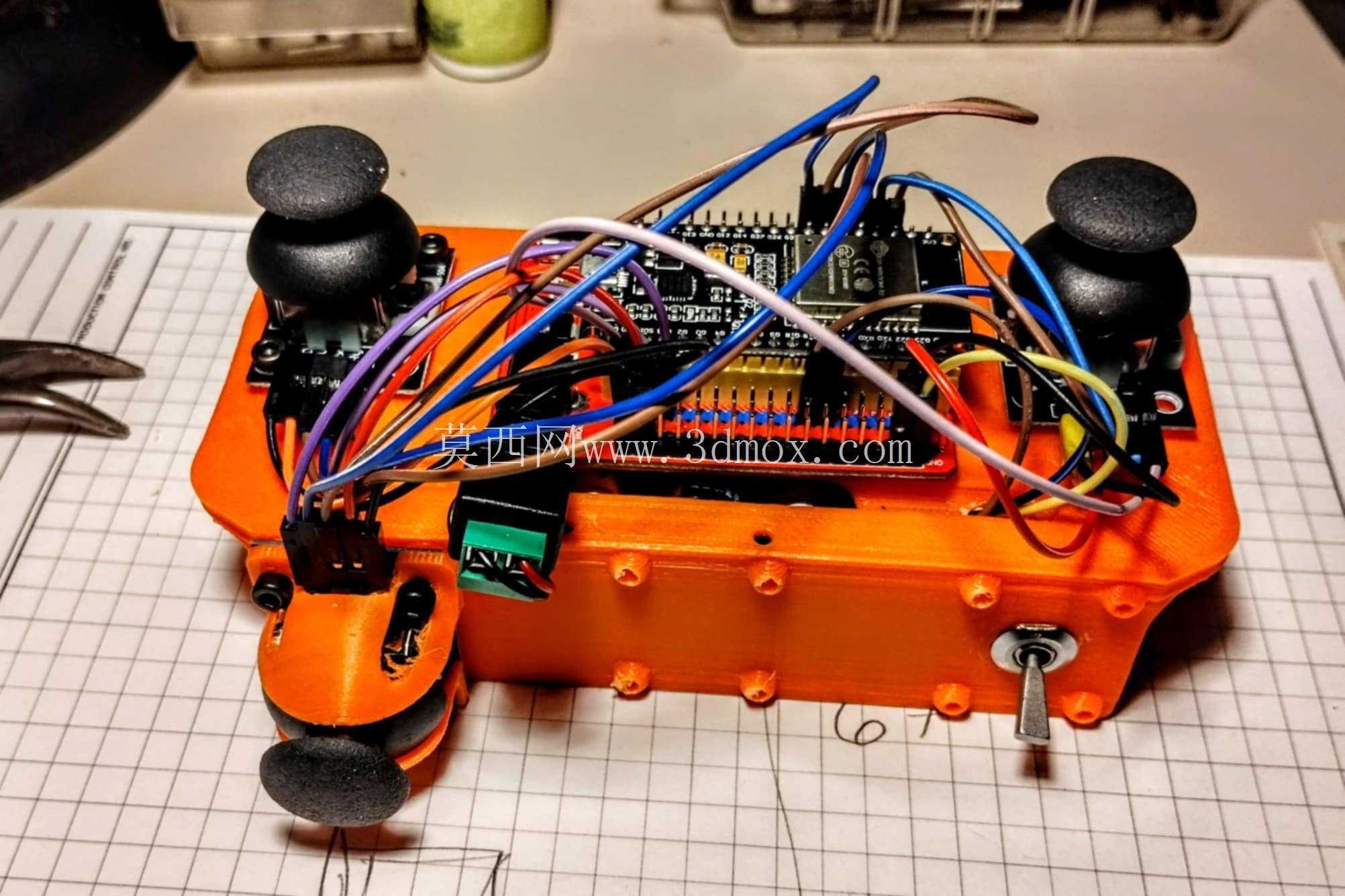
这是一个非常基本的WIFI操纵杆,使用基于ESP32扩展板的股票再区分操纵杆。在我的项目中,它使用ESP32驱动MeArm型机器人代替Arduino nano。对于电源,建议使用标准的9V电池组6AA,但我注意到5mm圆形连接器有我认为目前的限制,因此“客户端”不会广播,除非我的扩展板的一个usb端口通过适配器供电。代码:https://github.com/raszga/ESP32-WIFI-mobile-platformp
标签:
------分隔线----------------------------

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Fusion 360,Rendering