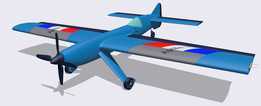
24小时黑客马拉松项目:潜艇机器人升级
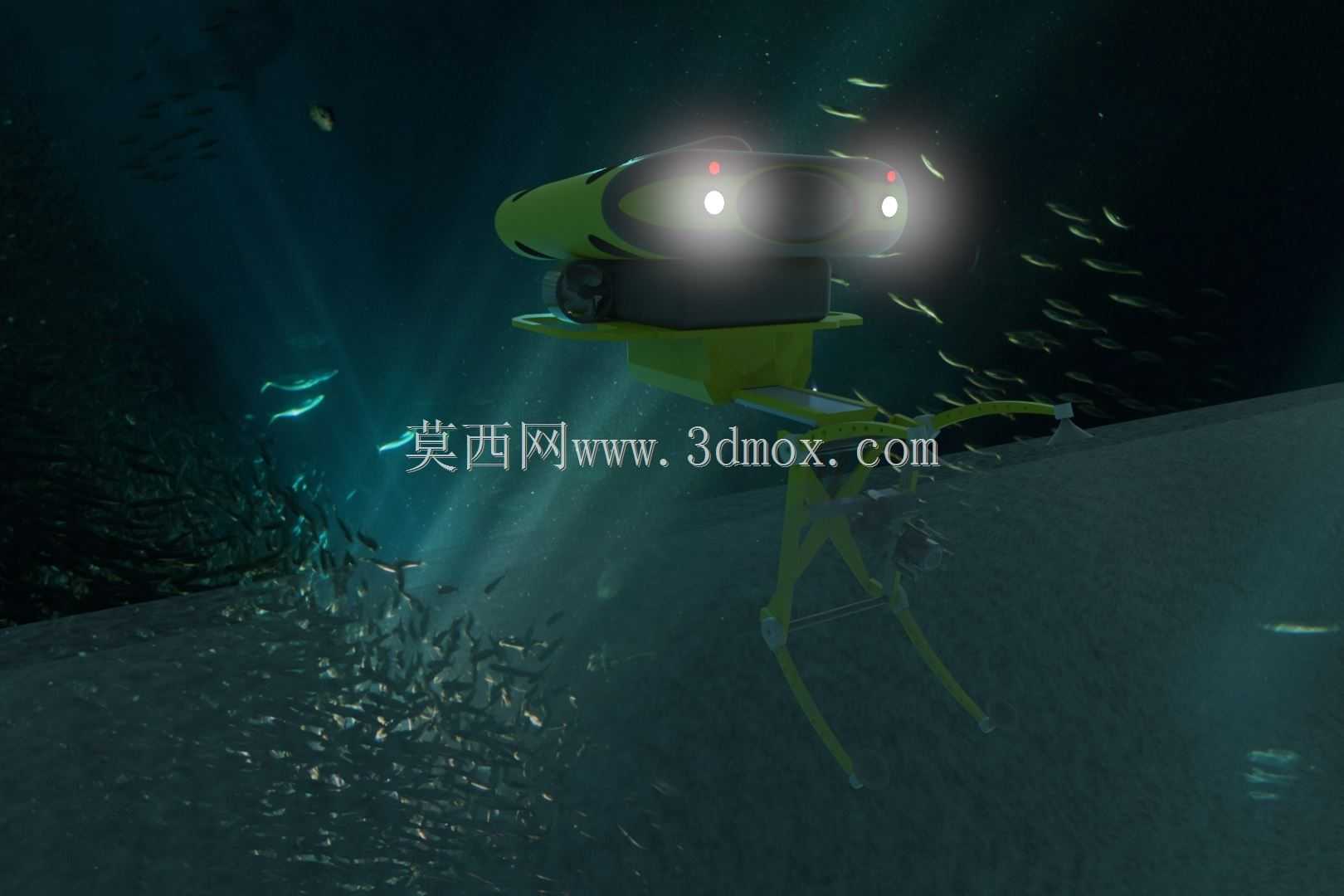

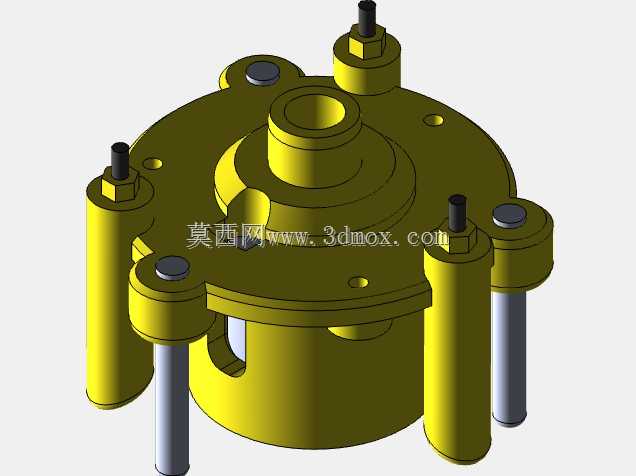
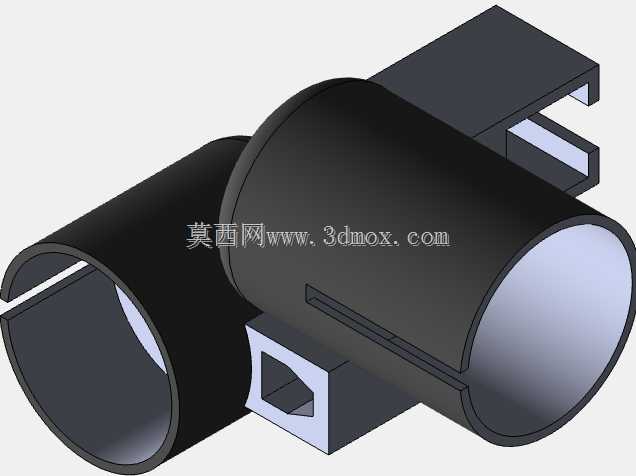


在一次24小时的黑客马拉松中,我开发了一种解决方案,用超声波表面控制探头升级潜艇机器人,用于水下油管检查。我的项目侧重于两个关键功能:增强稳定性:四个锚定臂被设计并集成到机器人的平台中,以将其牢牢固定在油管上。这种改进的稳定性显著提高了超声测量的准确性和可靠性。自动扫描:实施了一个数控系统来控制超声探头的运动。这使得探头能够沿管道表面扫描多个点,确保全面的检查覆盖。自清洁机制:在探头支架上添加了喷水器,以自动清洁探头表面,防止碎屑和污染物干扰超声波测量。为了更好地可视化所提出的解决方案,我设计了一个潜艇机器人的低保真度模型,并生成了3D渲染。这些视觉辅助工具有效地展示了新功能的集成及其对水下油管检查的潜在影响。该项目展示了整合先进技术以提高水下机器人高效可靠的油管检测能力的潜力。该解决方案被公认为黑客马拉松的第一名,此后被项目所有者采用,以进行进一步的开发和部署


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,STEP / IGES,Text file