三自由度Prevolute机器人(Fathy)

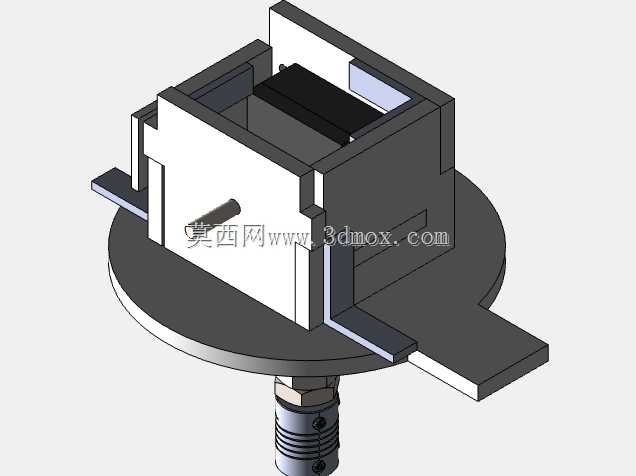
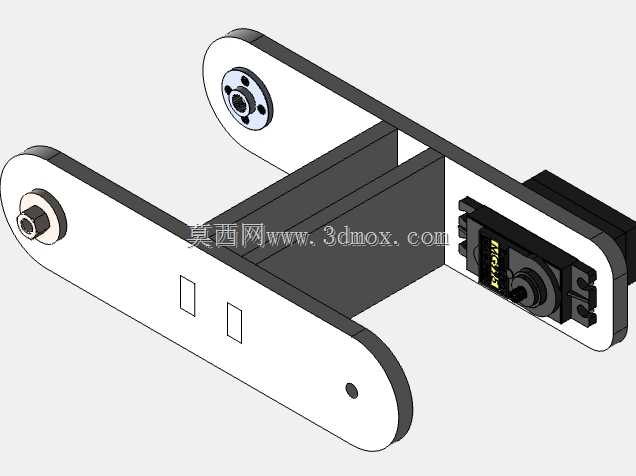
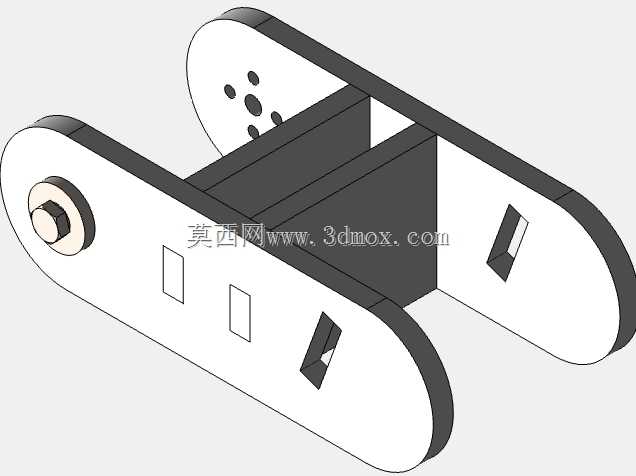
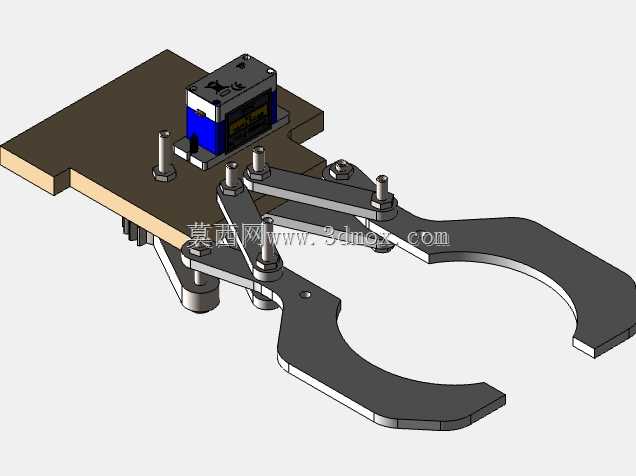

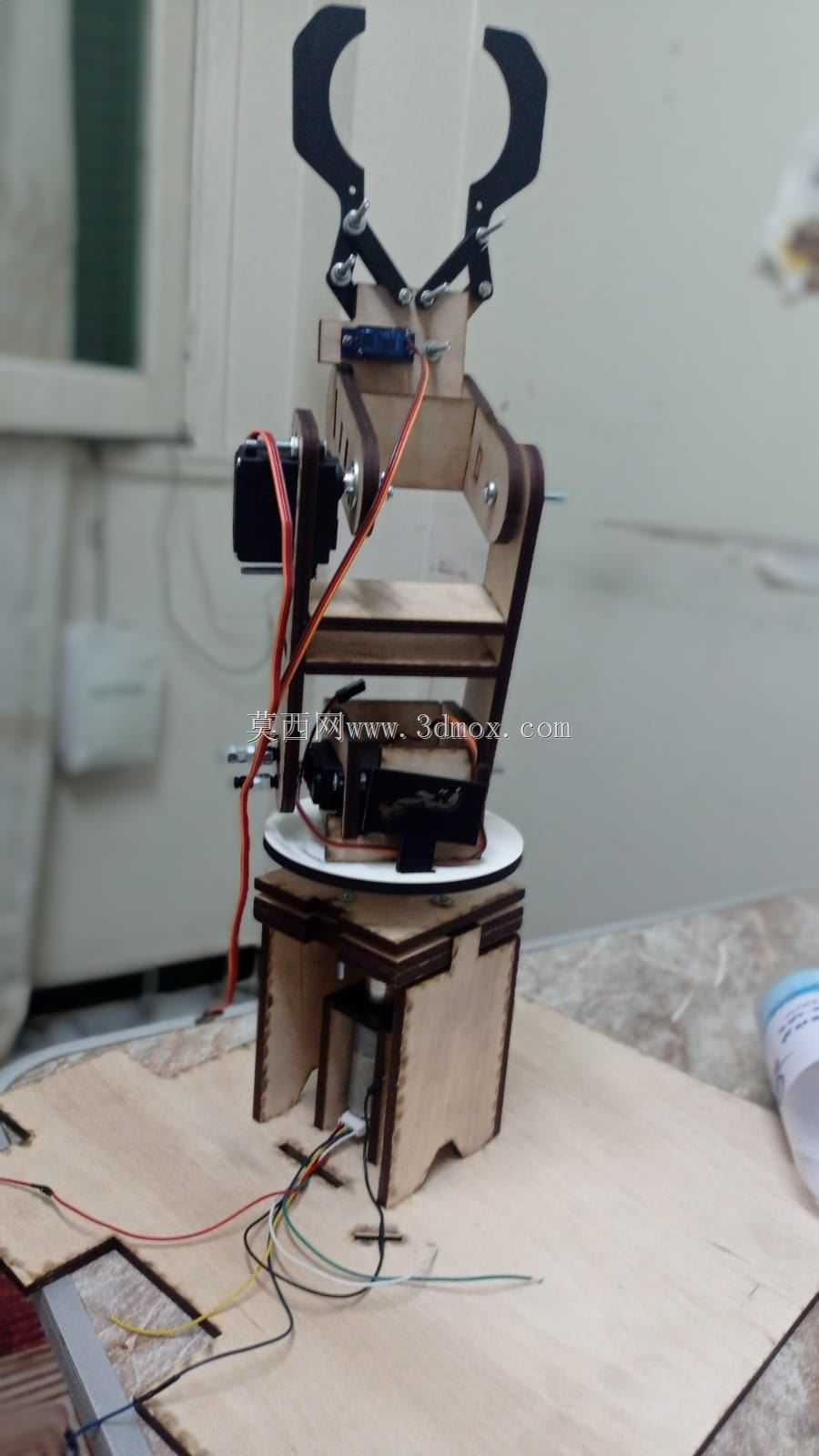







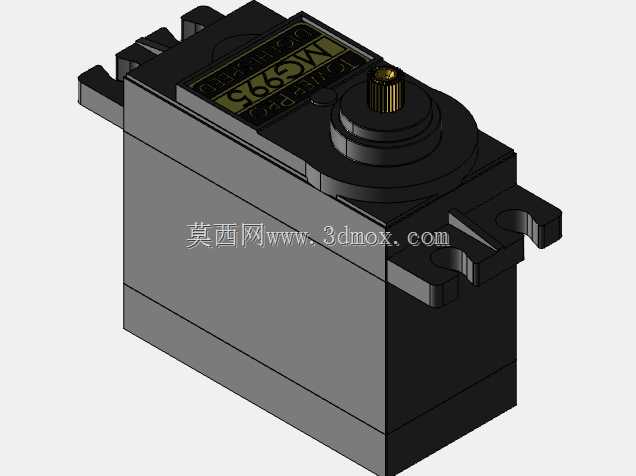





这是一个Uni项目,旨在设计一个用于拾取和放置的机器人,在机器人上应用全运动学,用PID控制其底座,并能够使用两个红外传感器回家。我附上了CAD文件,如果有人对运动学使用的检查或培训感兴趣,可以在MATLAB上使用。完整演示可在附带的驱动器链接上获得。MATLAB文件和代码是免费的,请联系我。一些重要的注意事项:1-夹具设计需要改进/更改2需要螺栓(或其他方法)来固定连杆,防止拆卸3这些伺服系统在启动时出现任意移动的信号错误,可以通过在启动时切断电源,然后在使用驱动器/开关发出初始信号后重新供电来避免。如需了解更多详情,请随时联系
------分隔线----------------------------
- 上一篇:06B链轮发电机
- 下一篇:Keyestudio KS0009照片中断模块

说点什么吧
- 全部评论(0)

还没有评论,快来抢沙发吧!
- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,SOLIDWORKS,Rendering