自动托盘装载机卸载机
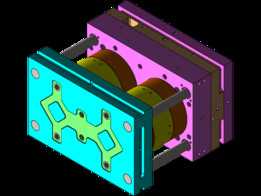
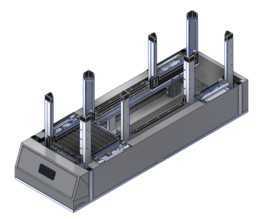
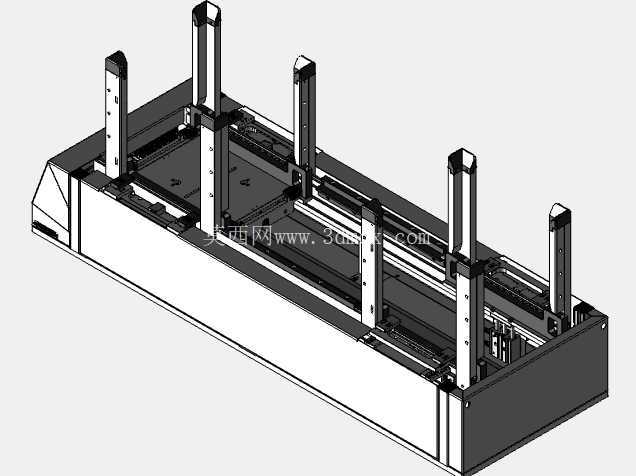
该版本主要应用于机器人取放站。 该模块用于托盘定位和堆叠。 模块运动允许机器人拾取托盘上的零件,同时操作员将完整的零件托盘送入模块输入区域的堆栈中。 操作员可以从输出区域拾取空托盘堆。
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering

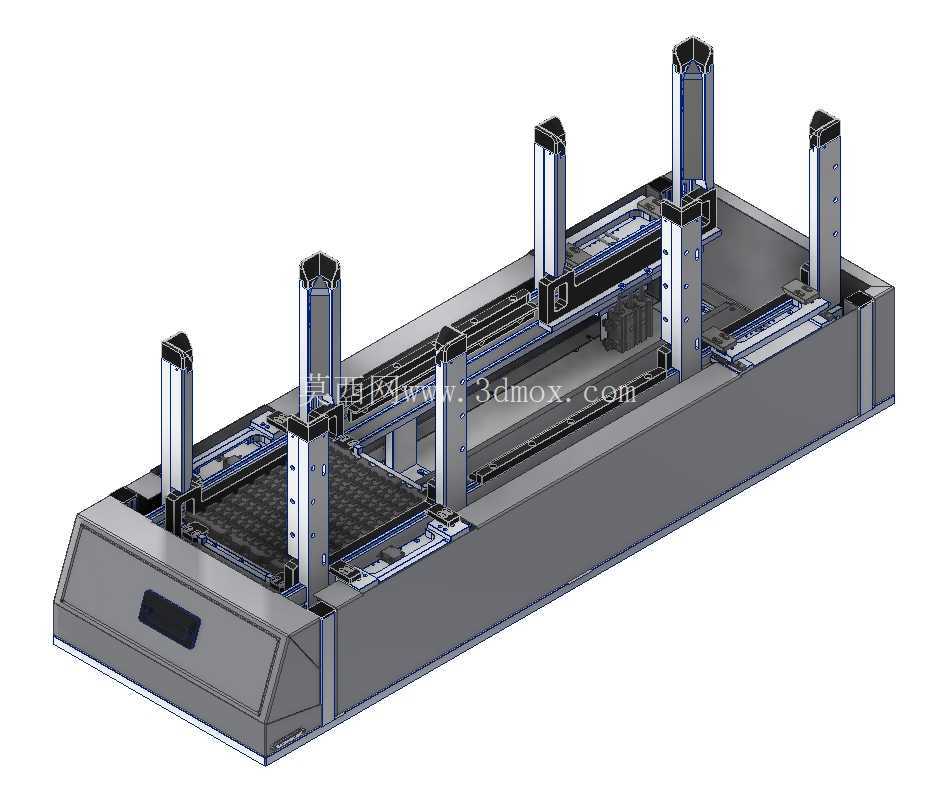
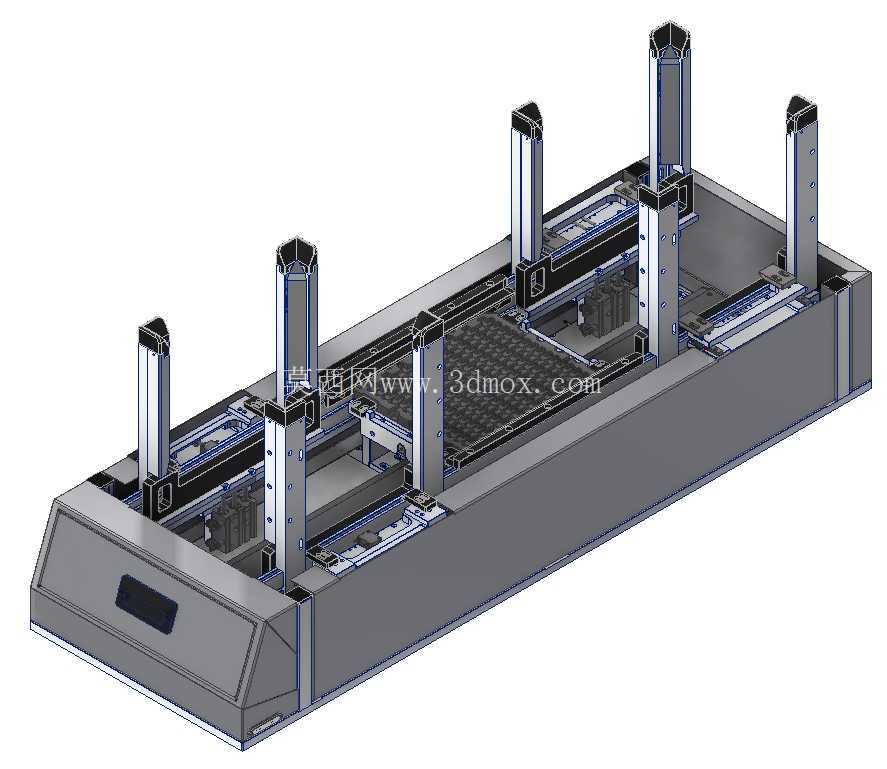
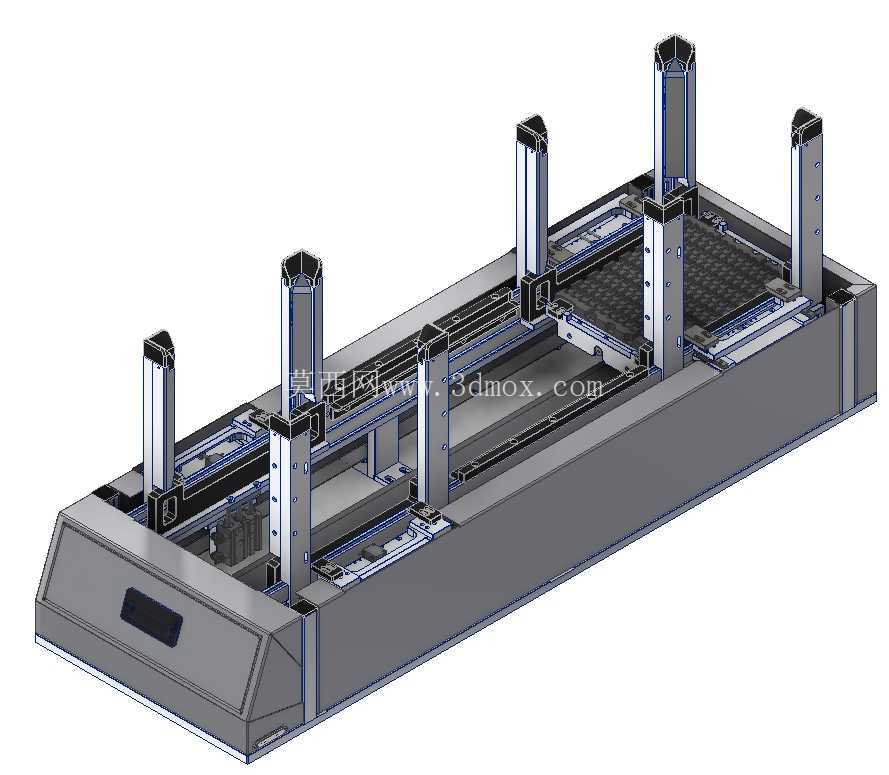
该版本主要应用于机器人取放站。 该模块用于托盘定位和堆叠。 模块运动允许机器人拾取托盘上的零件,同时操作员将完整的零件托盘送入模块输入区域的堆栈中。 操作员可以从输出区域拾取空托盘堆。