四自由度机械臂

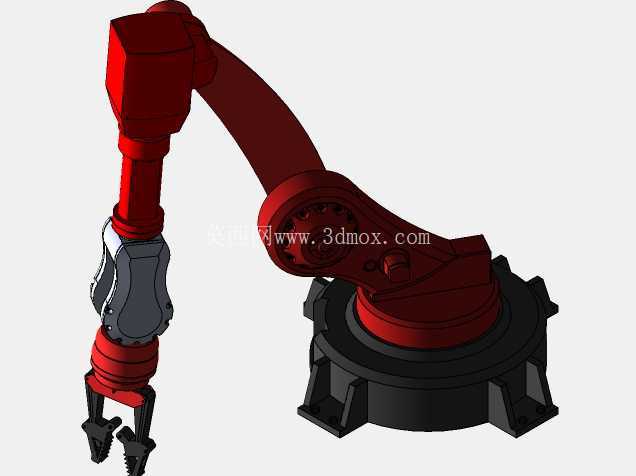
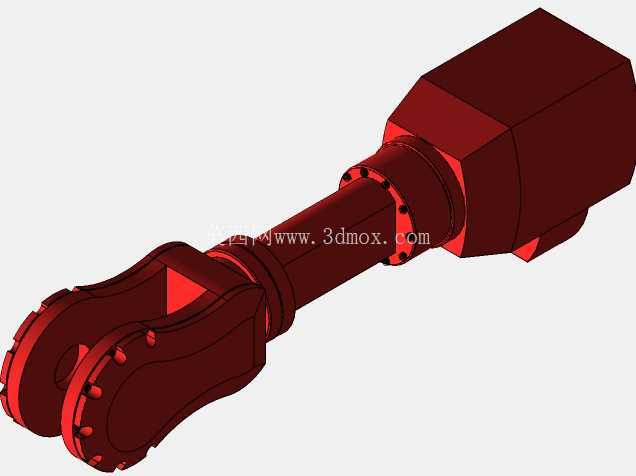
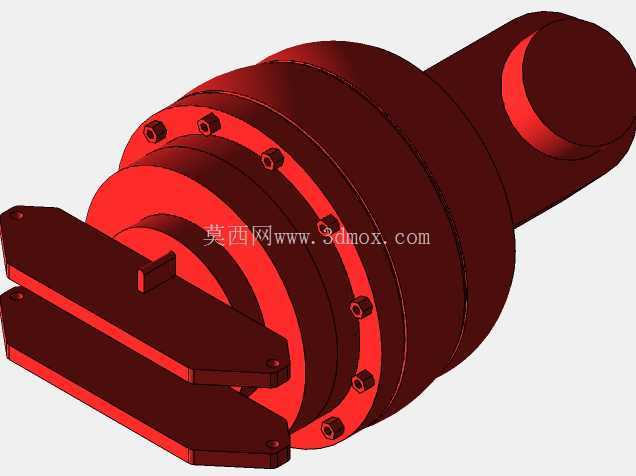
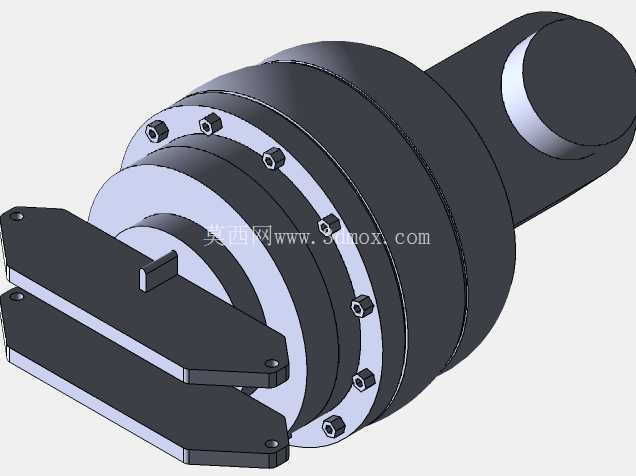


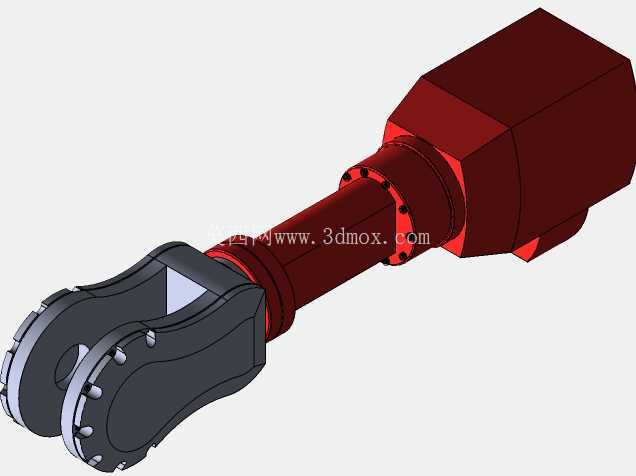



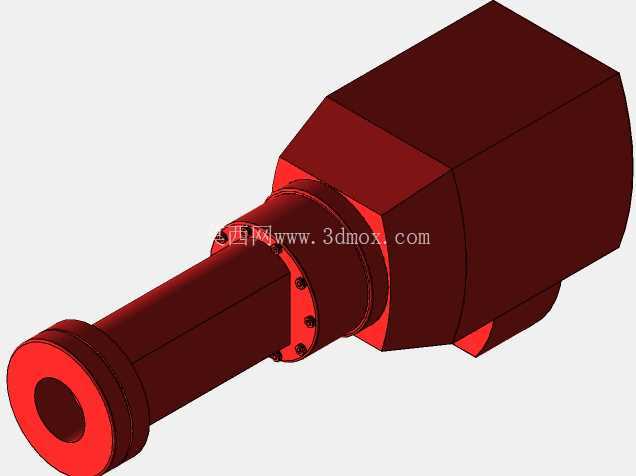
机械臂或机械臂是可编程机器人。 它的设计目的是执行类似于人臂的功能。 该手臂可以单独行动,也可以作为一些更复杂机器人的一部分。 这些手臂的连杆通过关节连接。 这些连杆形成运动链,其末端称为末端执行器。 末端执行器类似于人手。在这里,我设计了一个4DOF机械臂。 4DOF 手臂用于执行简单的功能,例如轻量举升任务,以协助工业和工厂。 它有 4 个关节,可以在 x、y 和 z 方向旋转。 关节以手腕的姿势移动连杆。我在 SolidWorks 中使用底座拉伸、放样底座/凸台、旋转底座/凸台和配合功能设计了这个模型。


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS