迷你无人机 (1)
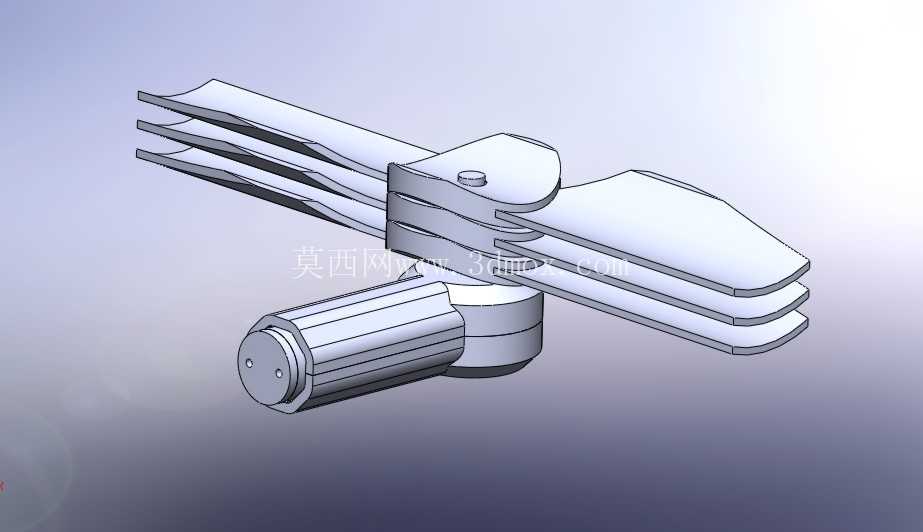

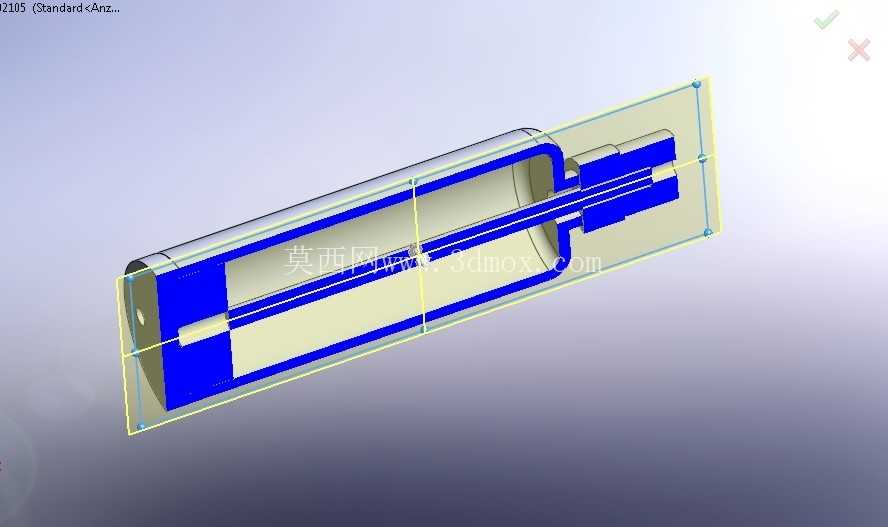
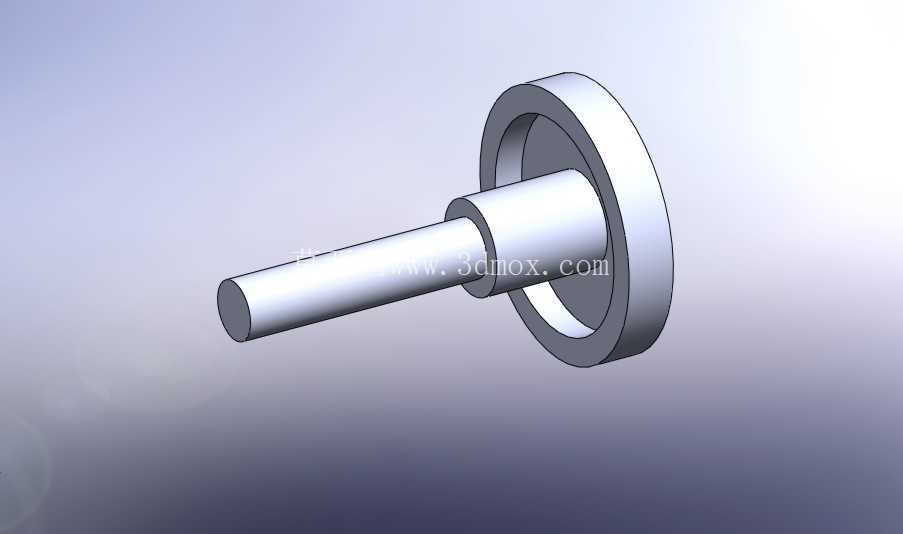
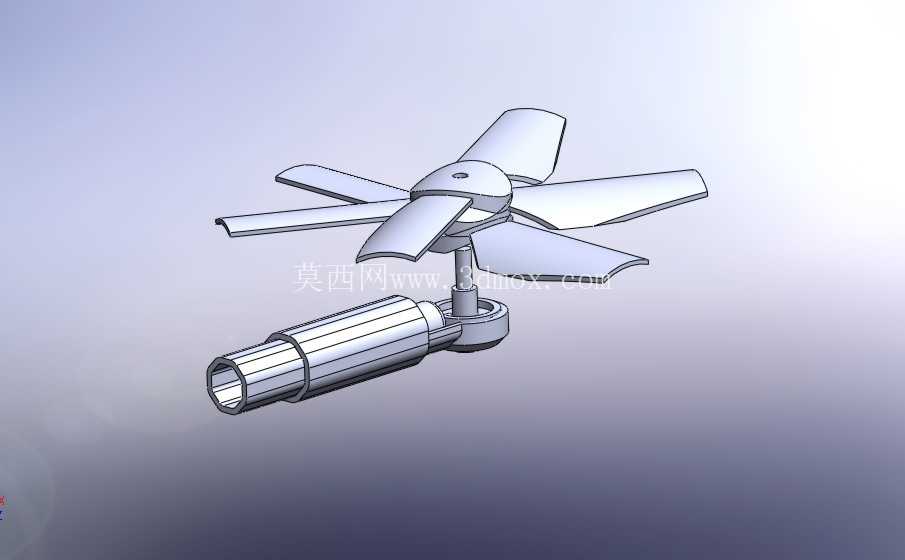
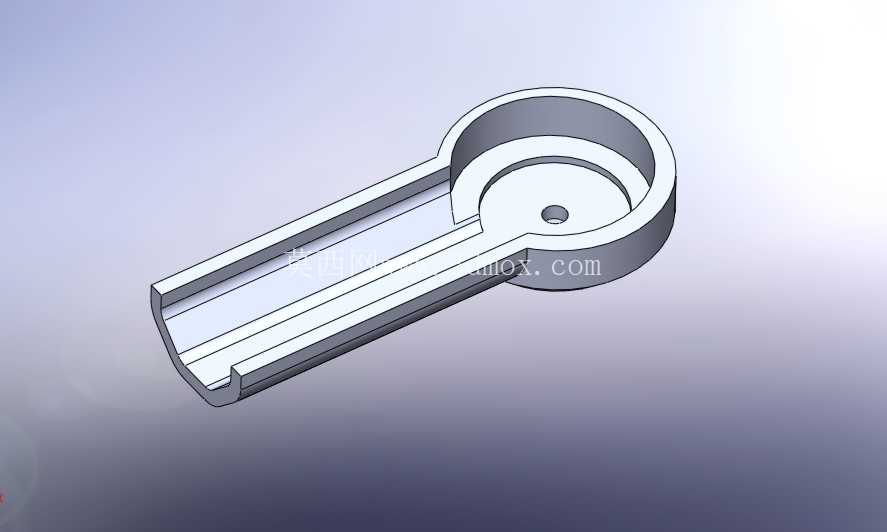

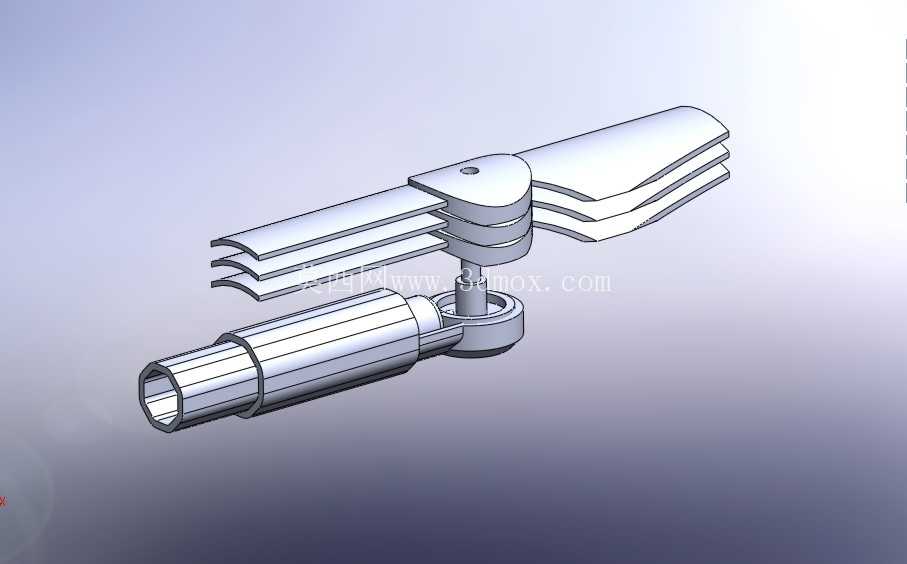






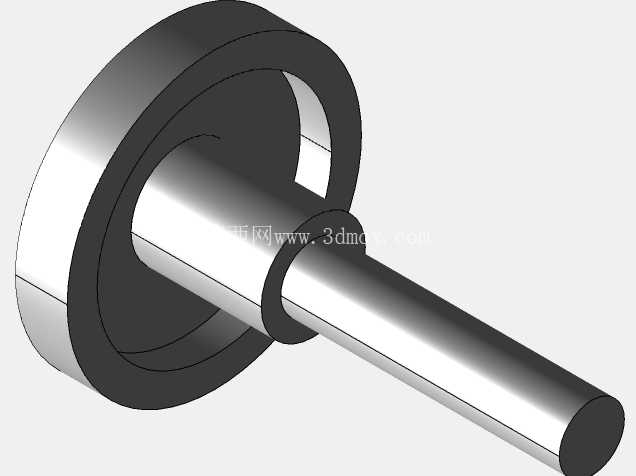



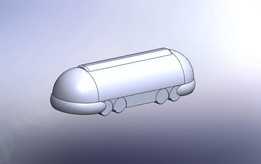
...这里我们有一个初步阶段 - 是的,开始开发!问题:我们计划建造新的鲶鱼和鸭子农场,在那里我们有蜜蜂为农场中使用的树木授粉。单级有 21 个蜂窝蜂箱机器人,我们需要监测蜜蜂授粉、花形成和果实形成的发展,还要监控蜜蜂,即使是最小的无人机,因为你不能也可能不会进入新农场。这里的问题是:你今天可以购买迷你无人机 - 但是没有迷你无人机――是的,像一只肥胖的(懒惰的)大黄蜂一样缓慢地飞行!所以我们试图在这里建造一个行动迟缓的摩登人――什么特别的是:他们应该自主行动!好几个!所以没有人展开旋翼臂 - 打开无人机并让它们飞行:我们需要能够自行完成所有事情的自动无人机 - 具有群体智能!即自动加载、自动操作的迷你无人机,将图像传输到主计算机 - 否则将永远照顾自己 - 全天候!今天你买不到这样的东西!所以我们必须自己做!阶段 - 我想尝试 - 将所需的 6 个转子臂置于转子叶片像鸟一样放置在机身上的状态 - 所有转子在静止时彼此叠置。我想制作转子通过伸缩导轨将手臂变小,尽可能小,
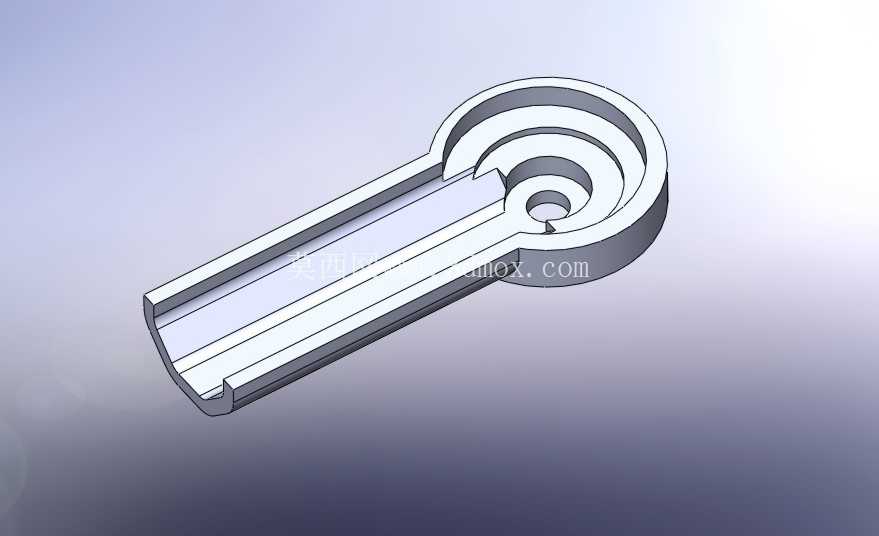
即静止时,将旋翼紧紧地放在微型无人机机身上。如果你有一个默认直径为7毫米的微型电机――那么不一定要自己造一个更小的,这是可行的:那就是决定一切的最初要求。在第一部分中,我尝试开发一个完整的转子臂,并且停止使用黄铜轴承:我们希望用高性能塑料制造一切 - 坚固、灵活且耐用!如果你突然想要并且拥有对业界多年建立和实践的方法采取不同的方法,那么它当然具有与传统技术完全不同的特性!step,igs,stl
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :STEP / IGES,Rendering,STL