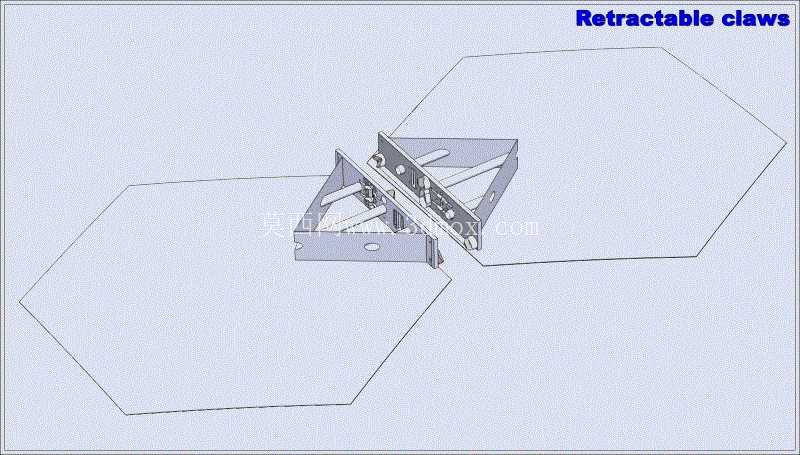
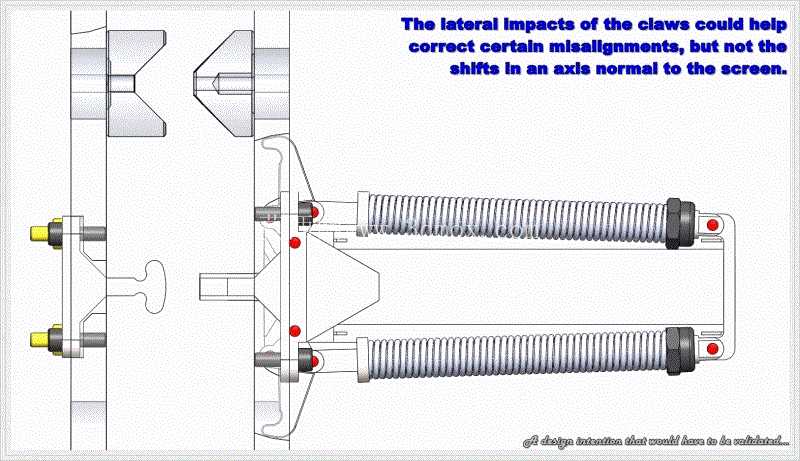
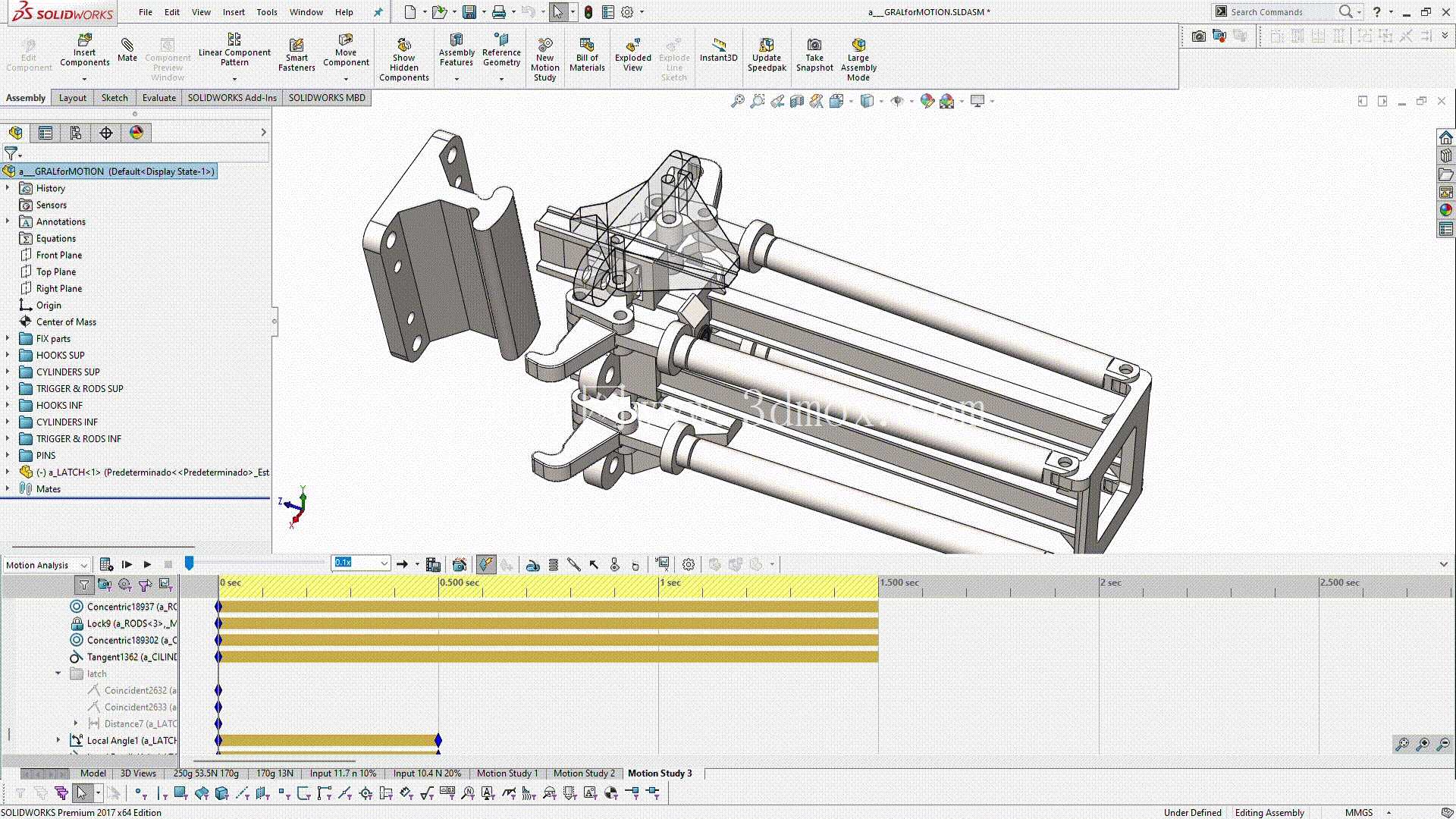
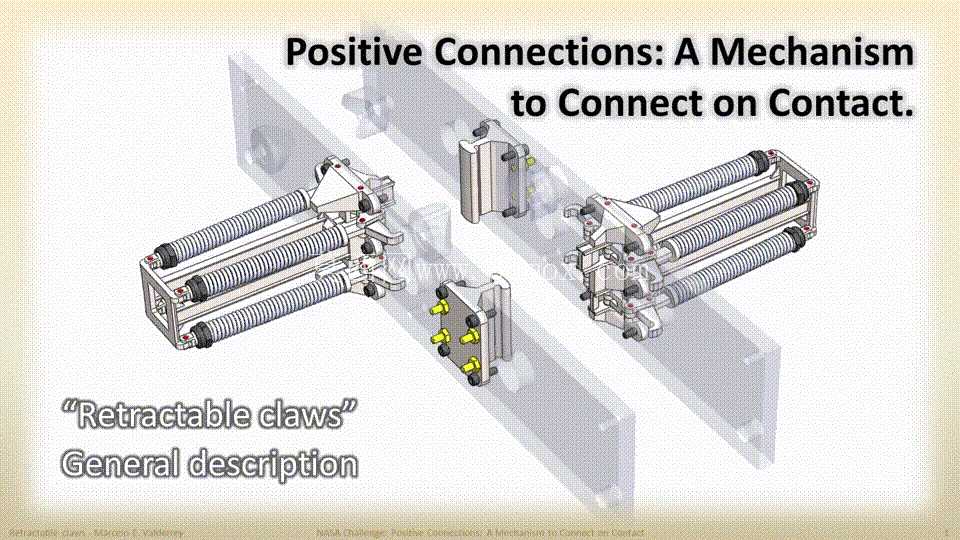
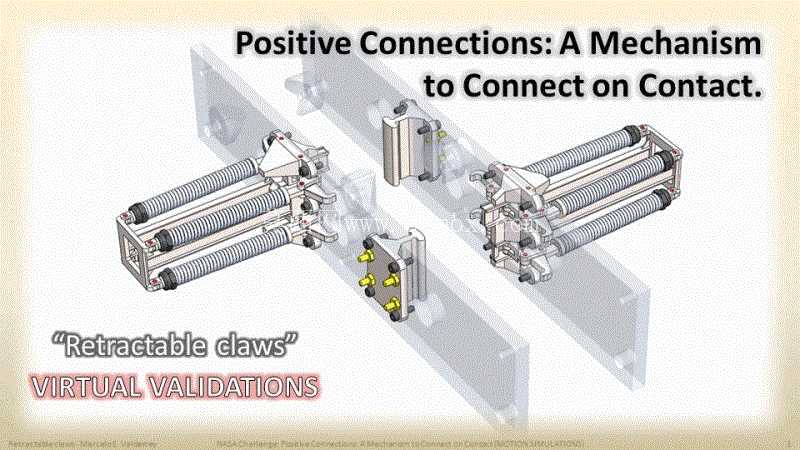
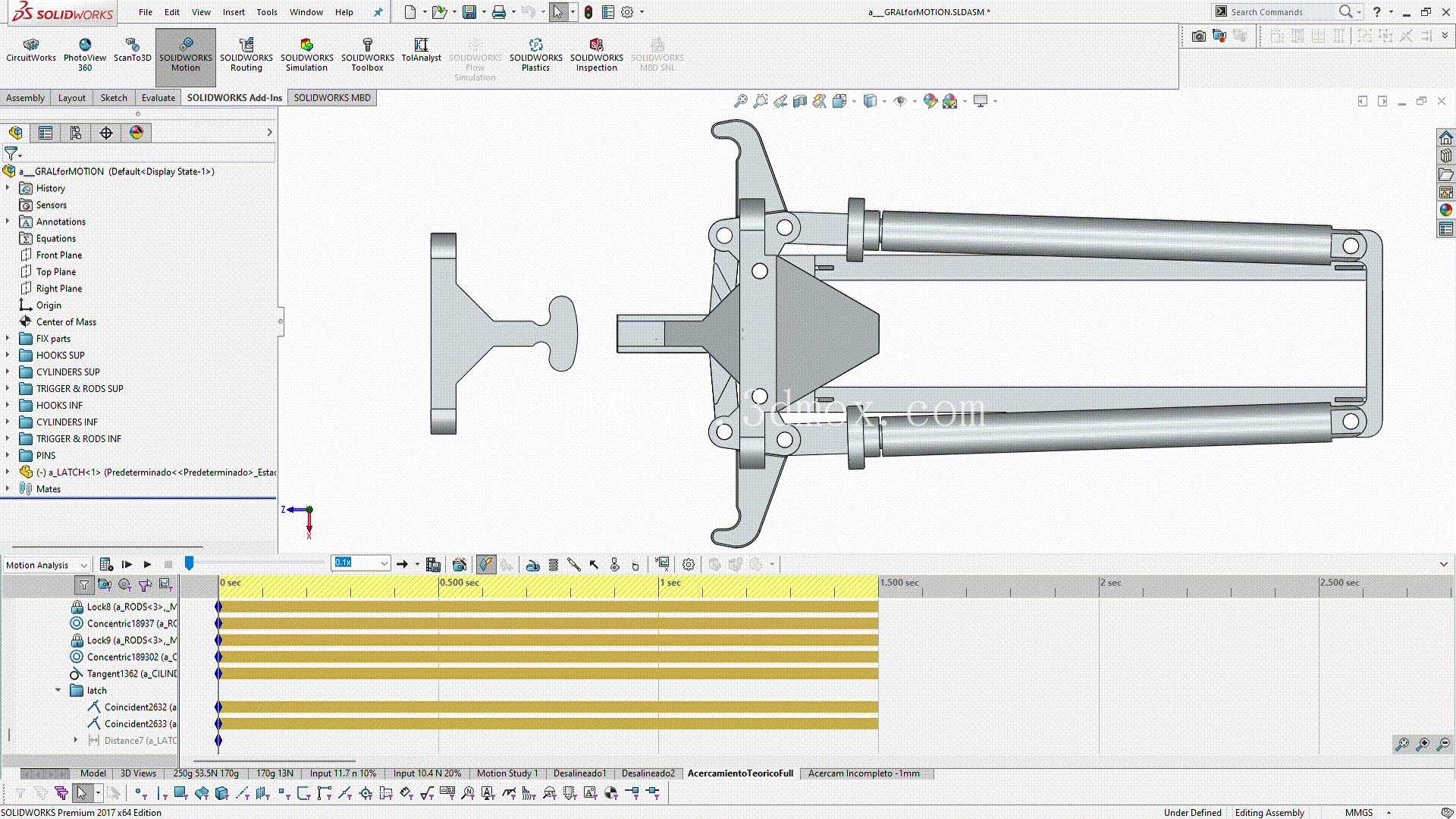
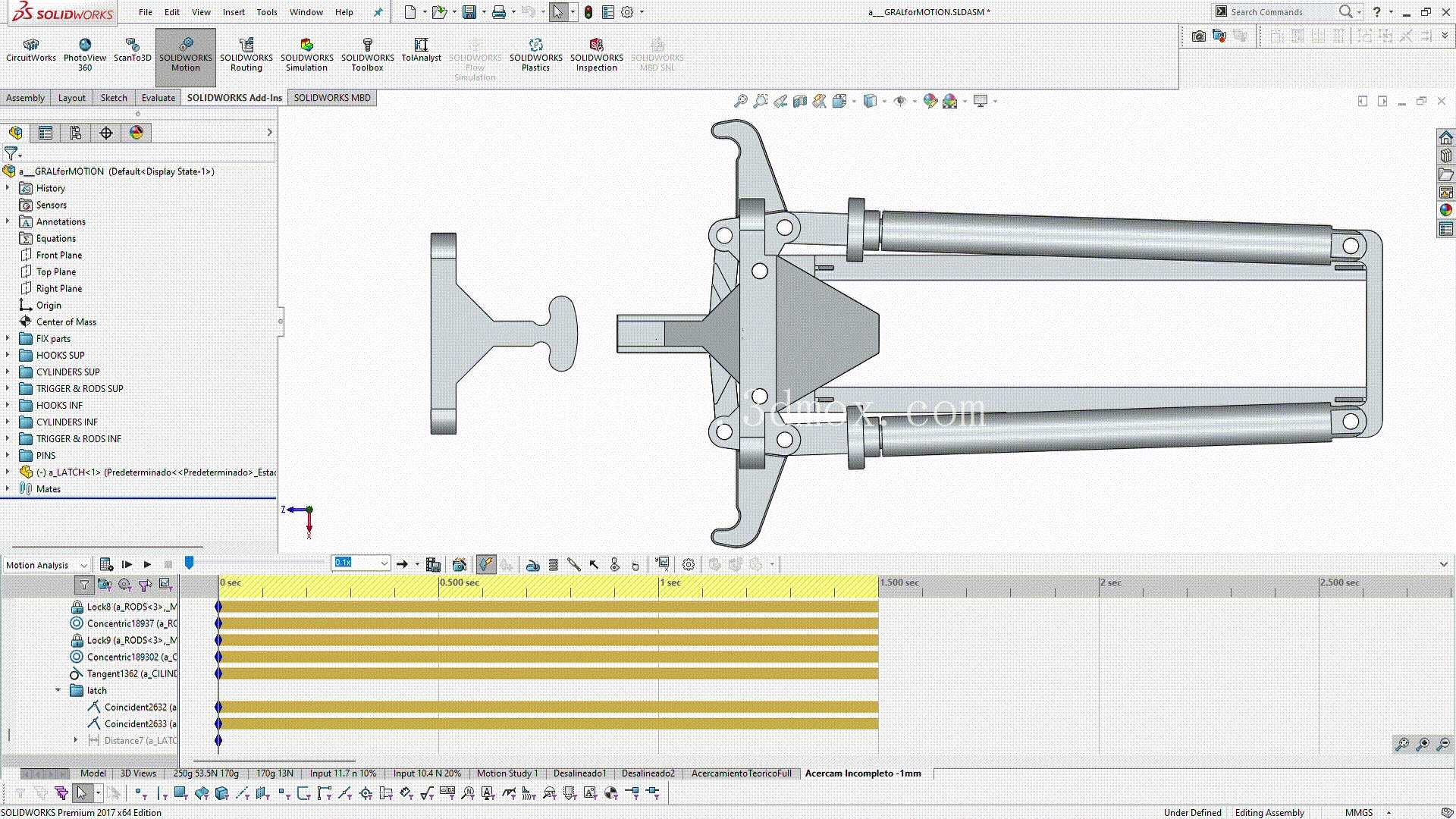
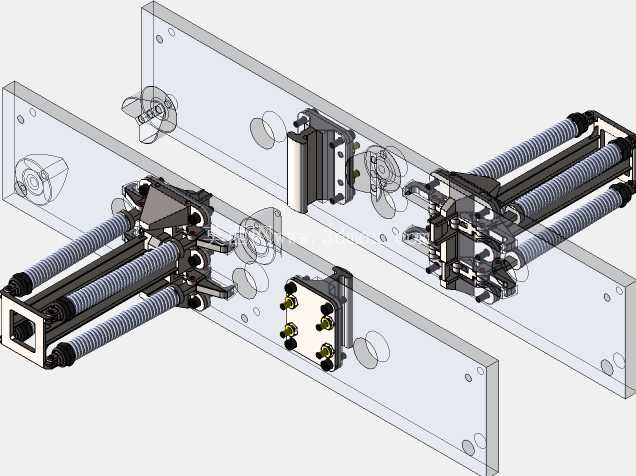
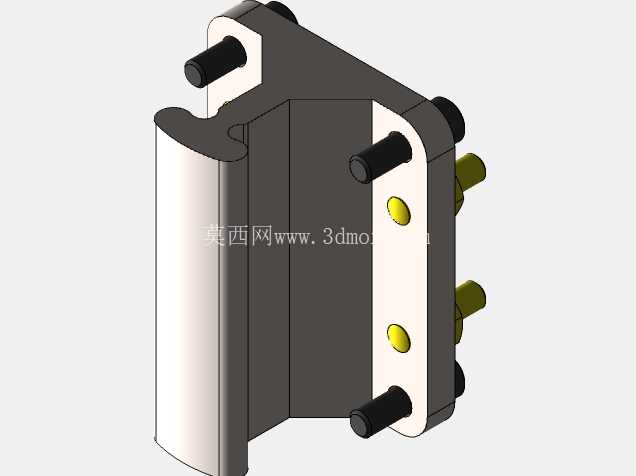
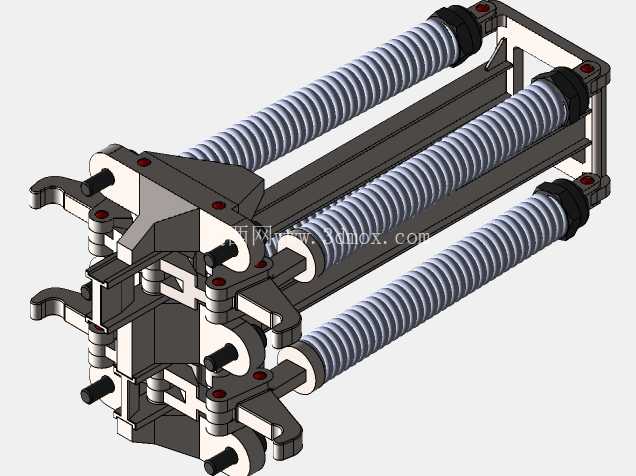
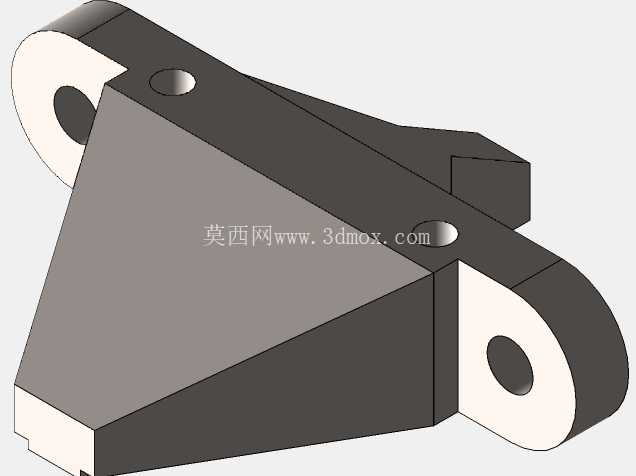
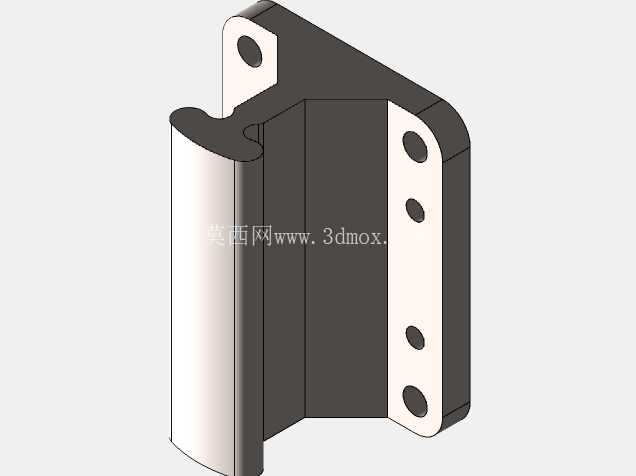
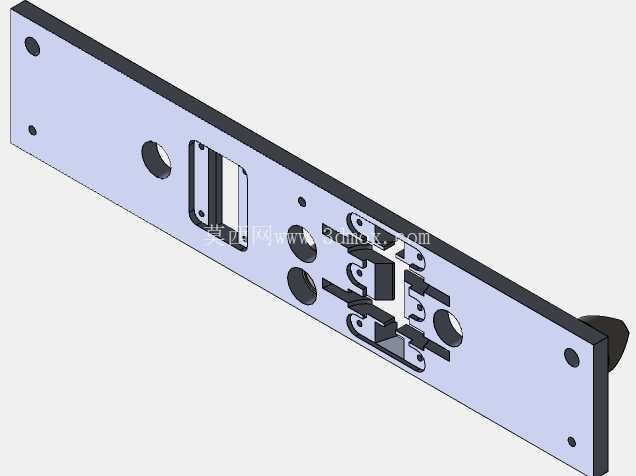
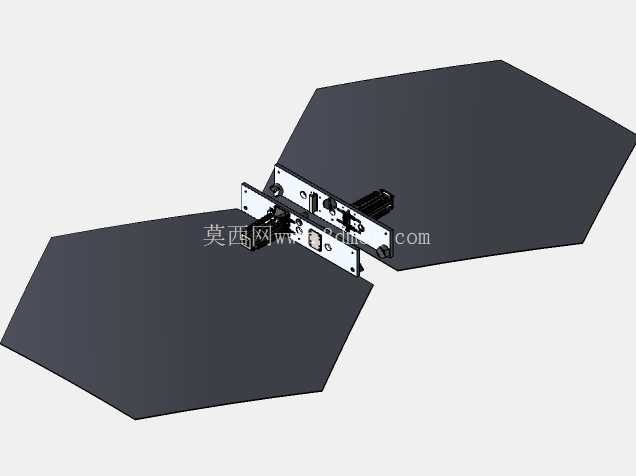
可伸缩的爪子
四对爪子具有可变灵敏度触发系统和可调节保持力,可产生冲击力以帮助对齐运动关节。在 SolidWorks 2017 中创建
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,Other,SOLIDWORKS,Snagit,STEP / IGES



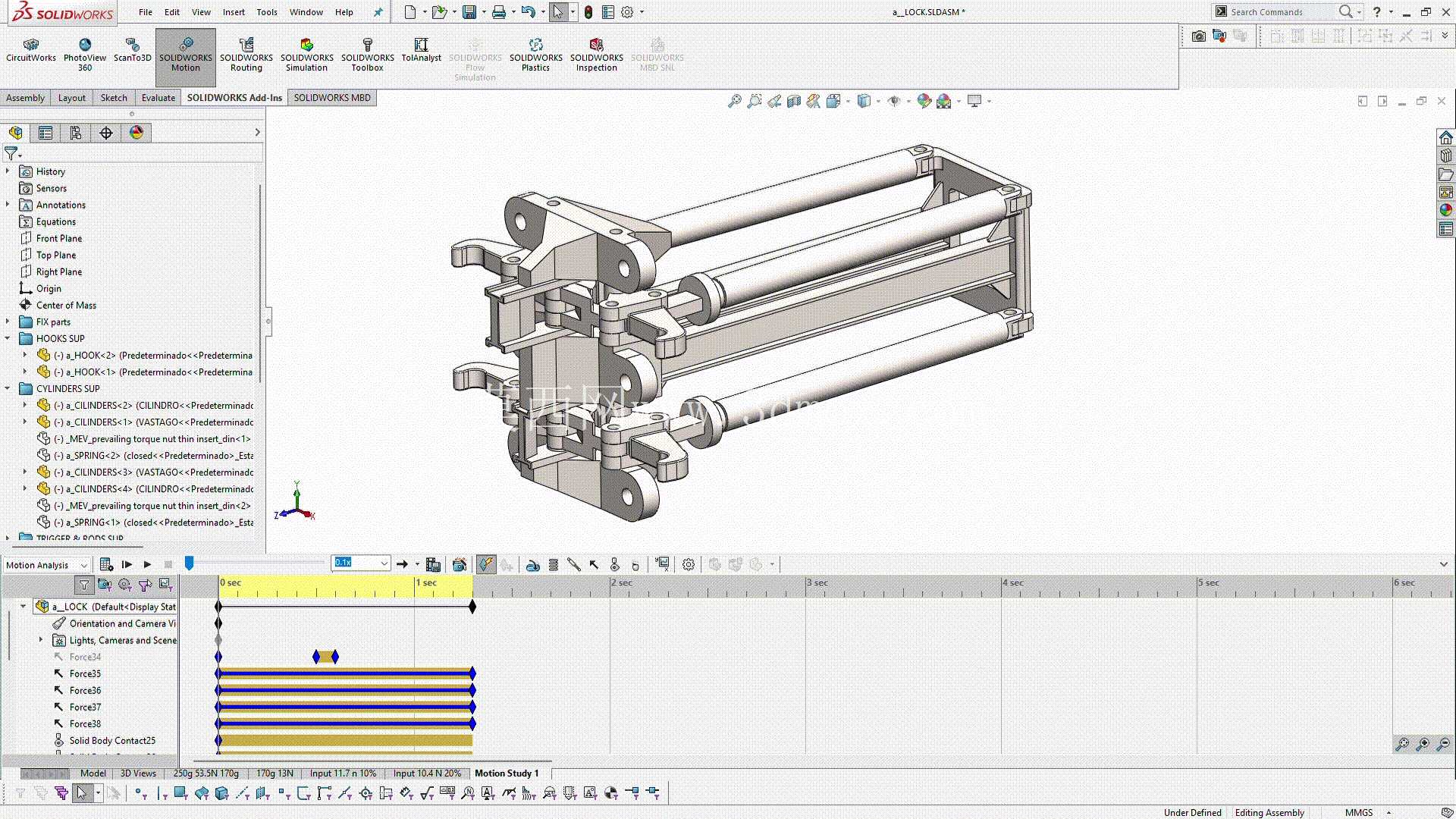
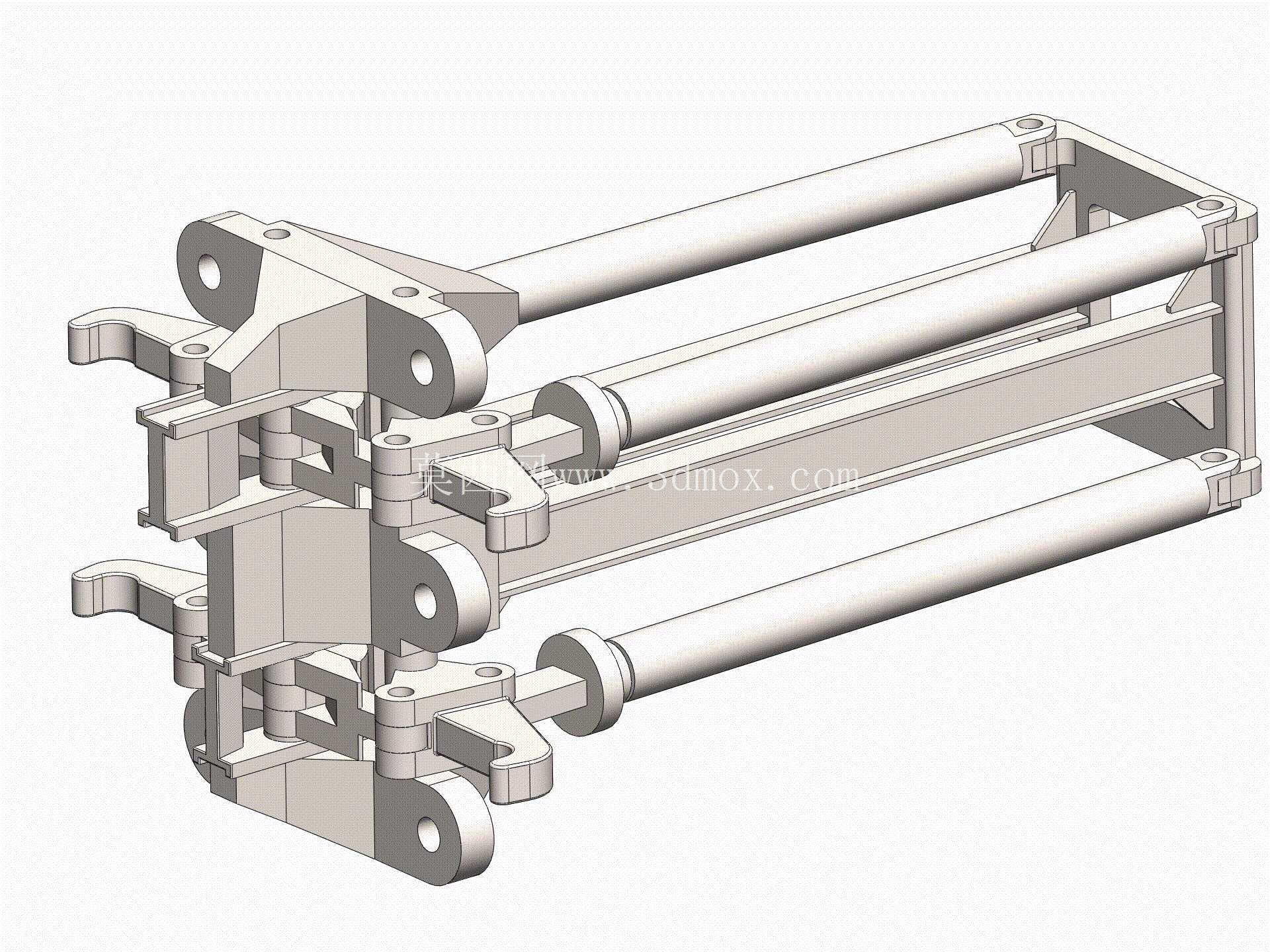

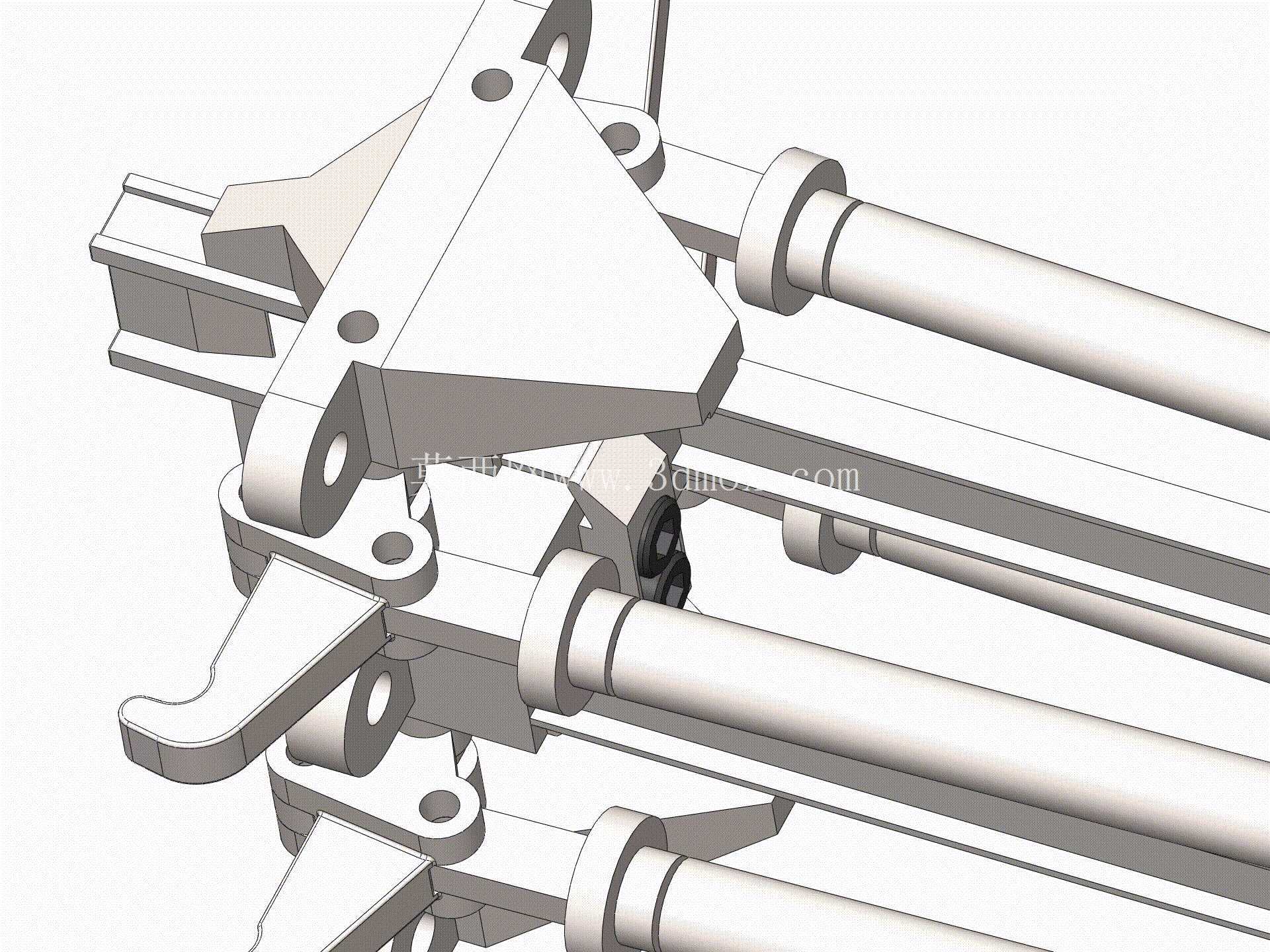
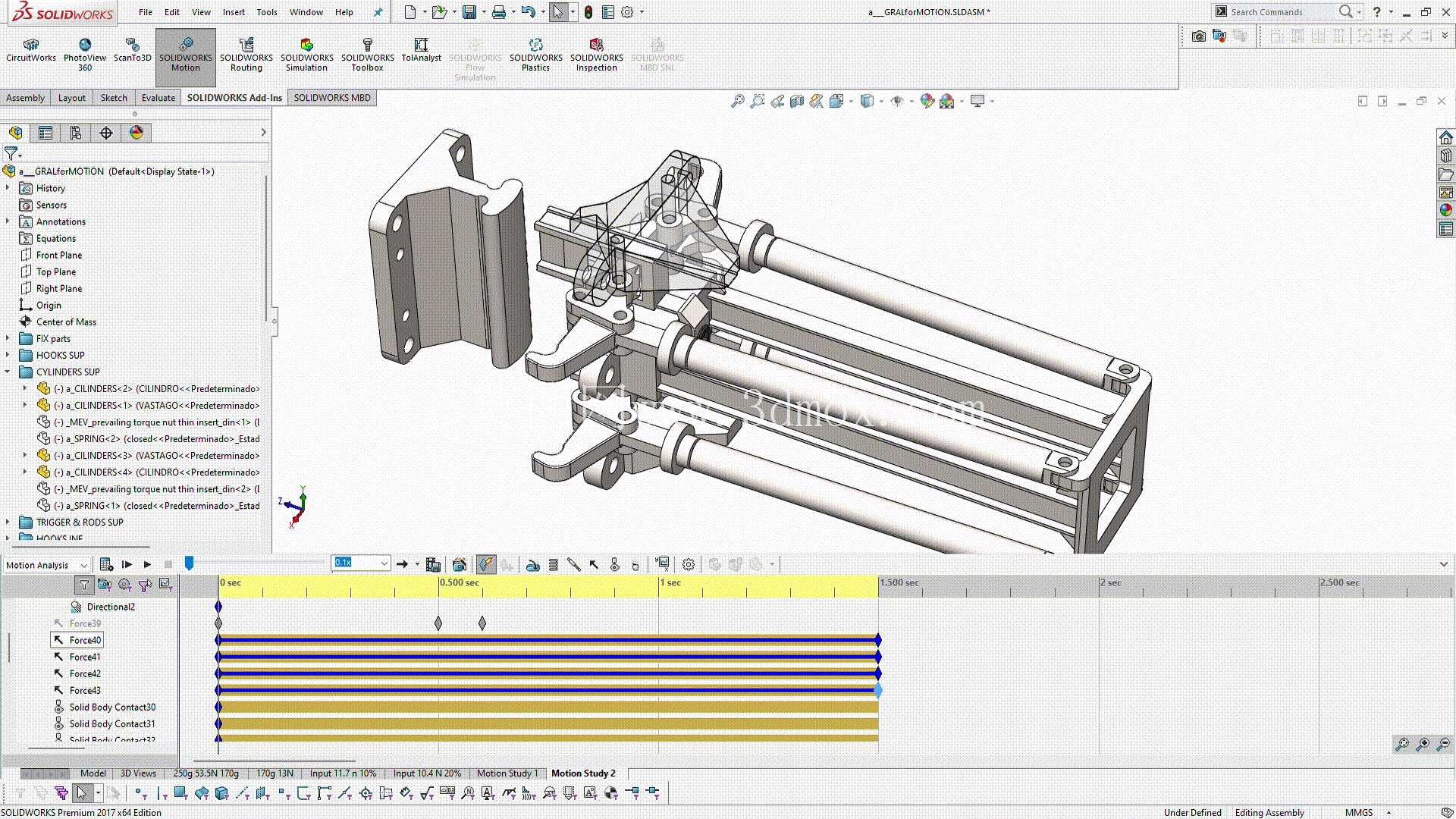

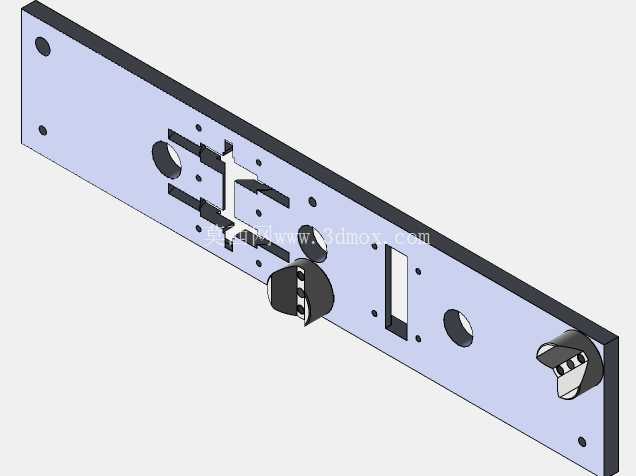
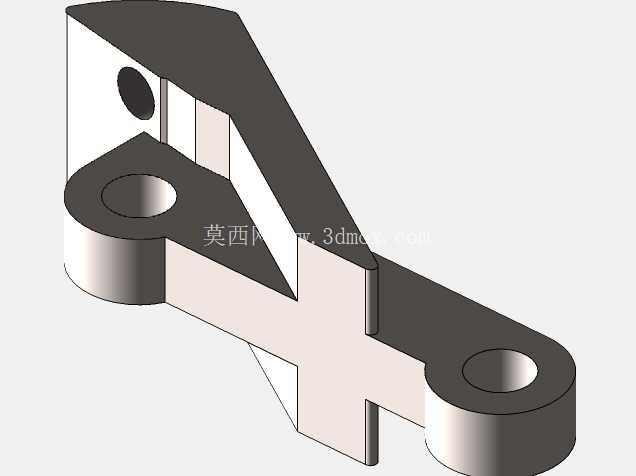

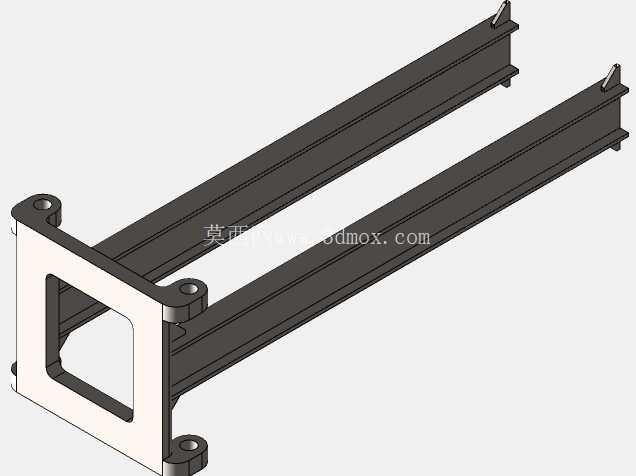
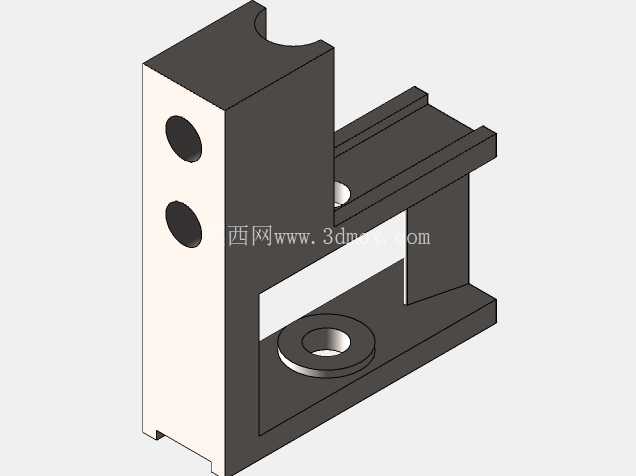

四对爪子具有可变灵敏度触发系统和可调节保持力,可产生冲击力以帮助对齐运动关节。在 SolidWorks 2017 中创建