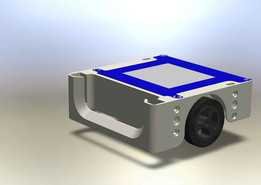
铁磁爬墙机器人
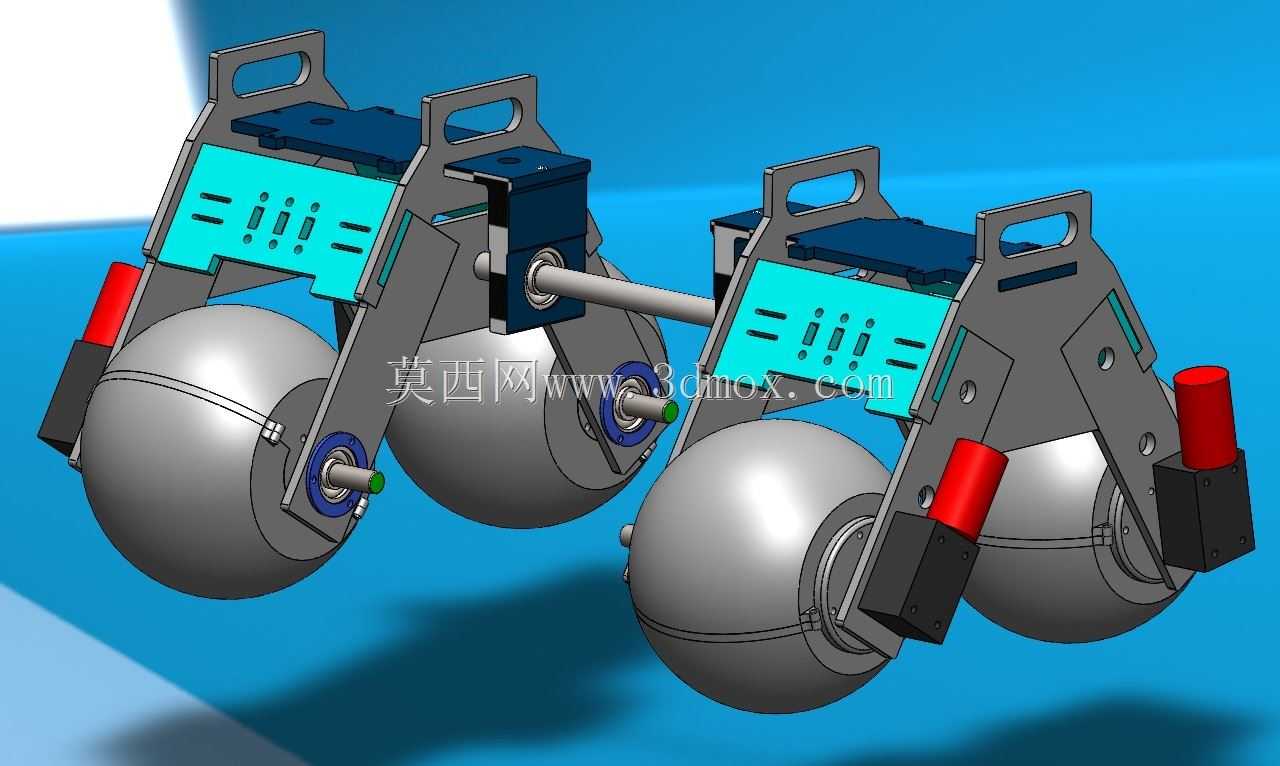

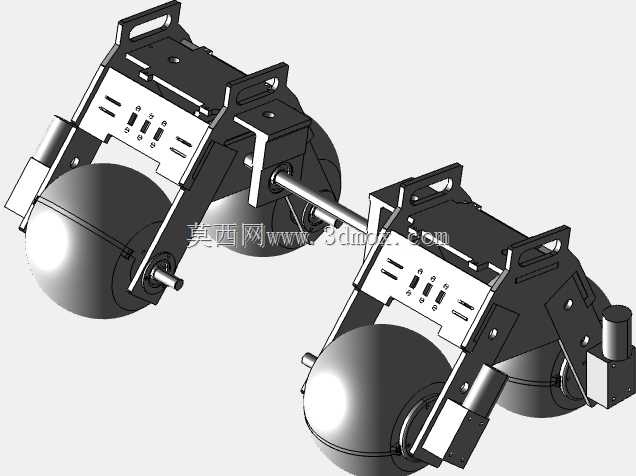
具有形状自适应磁力吸附机构的轮式爬墙机器人,适用于大型钢结构。为了在各种弯曲的铁磁表面上上下移动,项目成员开发了一种安装在每个轮子上的 2 自由度旋转磁力附着机构,该机构可以改变磁铁的方向,以保持磁力方向始终垂直于接触表面。这些磁轮具有球形形状,可以相对于主体移动了解更多详情,请随时联系:youssefkha.16@gmail.com
标签:


- 模型大小 :未知
- 消 耗 :5莫西点
- 下载次数 :
- 包含文件 :Rendering,SOLIDWORKS,Other,Text file,Snagit,Parasolid,STEP / IGES