机器人灵巧手
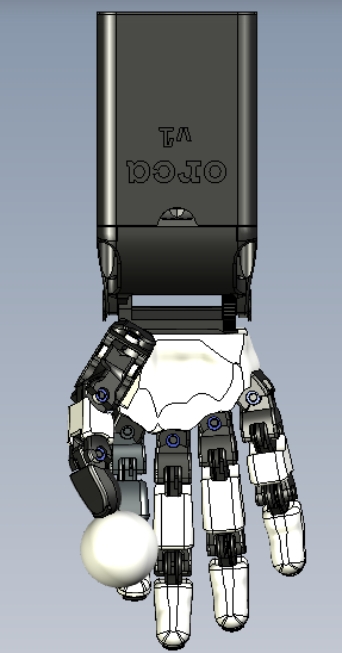
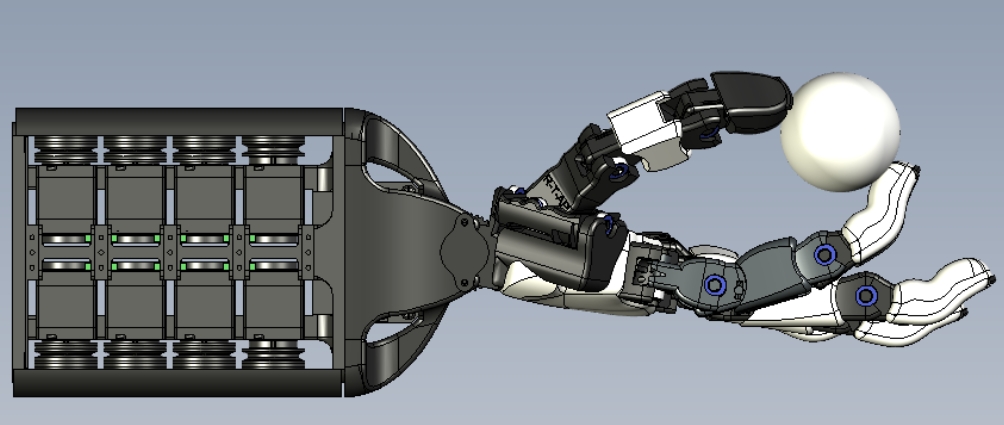
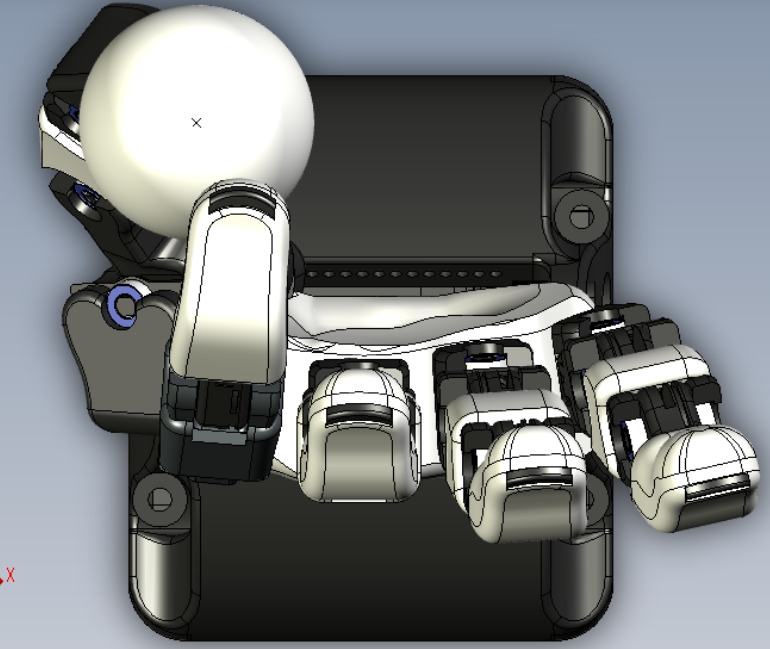
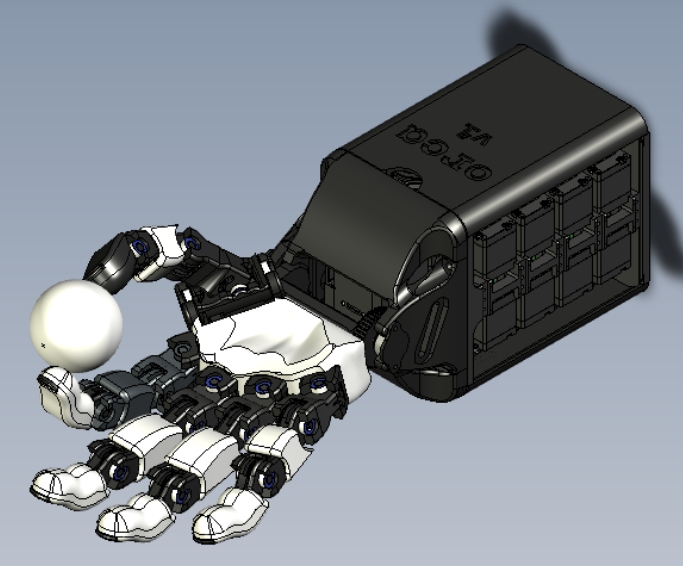
机器人灵巧手是指具有多个手指和较高自由度的机器人末端执行器,用于模仿人类手部的精细操作。 机器人灵巧手通常具有3个或更多的手指,并且拥有不少于9个自由度。这种设计使得灵巧手能够在各种复杂的环境中执行精细的任务,如抓取、操纵物体等。灵巧手的驱动系统由驱动器和传动系统组成,其中驱动器负责产生运动和力,而传动系统则将这些运动和力传递到手指的关节。
标签:


- 模型大小 :3MB
- 消 耗 :300莫西点
- 下载次数 :
- 包含文件 :